







来源:机器人大讲堂
这不是异形,而是一个既可以陆地行走、玩滑板,还可以走钢丝,平稳飞行的机器人!

美国加州理工学院自主系统和技术中心(CAST)的一个团队开发出了一款名叫LEONARDO的飞行机器人,机器人结合了双足行走与飞行两种运动姿态,使其具有异常的灵活性,能够进行复杂的运动。


LEONARDO 飞行机器人,全名为LEgsONboARDdrOne,缩写又称 LEO,主要使用多关节机械腿及螺旋桨推进器设计。LEONARDO开发团队已在线发布这款机器人的最新论文,同时 LEONARDO也成为 2021年10月的 Science Robotics的封面照。
 论文链接:https://www.science.org/doi/10.1126/scirobotics.abf8136
论文链接:https://www.science.org/doi/10.1126/scirobotics.abf8136LEO 的重量为 2.58 公斤,行走时的整体高度为 75 厘米。它主要由躯干、螺旋桨推进系统和两条带尖脚跟的腿三部分组成。
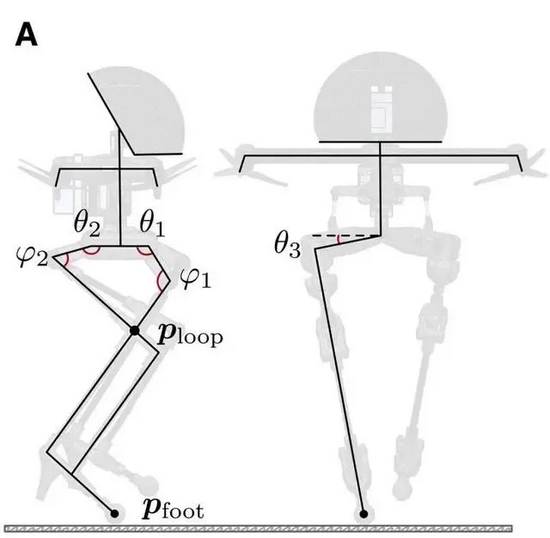
为了使其足够轻量化,LEO 的腿部结构采用碳纤维管和 3D 打印碳纤维增强尼龙关节来支撑滚珠轴承。它的两条腿是对称的,每条腿都有 3 个伺服电机,一个位于骨盆处,另外两个位于髋部的前后,三个伺服电机共同控制腿部的运动。
LEO 的肩部安装有 4 个对称放置的螺旋桨,用来稳定和控制行走和飞行动作。
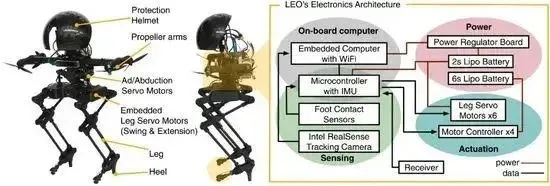
高跟鞋的设计是为了尽可能减少面积和重量,同时在站立不动的时候能保持稳定:
LEO 可以通过其机载计算机和传感器套件完全自主运行,根据需要穿越的障碍物类型,它可以选择使用步行或飞行,或根据需要将两者混合使用。
LEO靠双腿和螺旋桨的配合,只要给他一个能站的平面,哪怕是撒上油的易滑平面都能保持稳定。
还具有极高的抗干扰能力,在达 3.8 m/s 的风速下也能保持稳定。
目前,LEO身上背的电池能维持它进行100秒飞行或3.5分钟行走。
研究人员在论文中谈道:“也许最适合 LEO 的应用是那些涉及高空作业的应用,这些工作对人类来说通常是危险的,需要机器人来替代。”
例如,目前高压线路检测依靠专业人员来完成,他们不仅要远距离检查线路,还要走在线路上进行检查和维修。利用 LEO 无需再派遣人员爬上电线,只用让机器人飞到高压线路上并沿着电线行走来进行检修工作,这会降低检修成本,也能够降低人员坠落伤亡的可能。
除了这些作用之外,为 LEO 设计的技术还可以促进自适应起落架系统的发展。研究团队设想,未来的火星旋翼机可以配备腿式起落架,以便它们降落在倾斜或不平坦的地形上时可以保持身体平衡,从而降低在着陆失败的风险。
LEO的科幻属性并非偶然。该团队的灵感来自虚构的飞行人形机器人Astro Boy和由 Gravity Industries 的 Richard Browning 制造的类似钢铁侠的喷气服。然而,该项目的最终目的是从动力学和控制的角度研究步行和飞行的交叉点,并“赋予前所未有的步行能力并解决混合运动带来的问题”,正如该团队在视频中所解释的那样。加州理工学院团队还希望为复杂地形上的垂直起降 (VTOL) 制造自适应起落架。



“掌”握科技鲜闻 (微信搜索techsina或扫描左侧二维码关注)







 福建三明
福建三明












