


新浪财经年度巨献,推出年度策略会,邀请200+金麒麟分析师、50+优秀基金经理专场直播,为投资者打造“全明星阵容”,全面透析2021年A股机会和风险,立刻观看
原标题:特斯拉失控事件原因分析 来源:东方财富网
原标题:特斯拉失控事件原因分析

这篇文章介绍了一次特斯拉突然加速事件的ERD(汽车事故数据记录器)日志数据。为了解释EDR数据,操作并分析特斯拉驱动电机控制系统和制动系统的研究。正如预期的那样,制动系统和能量回收系统是完全独立的。然而,制动系统和几个车辆稳定性控制功能,在车轮打滑的情况下对能量回收操作有深远的影响,例如在经过颠簸和转弯时停止能量回收。其中一个滑移控制功能可以使驱动电机加速,此时能量回收系统会导致后驱动轮打滑,从而导致转向过度或转向不足。
同样的滑移控制功能也会被有缺陷的制动灯开关误导,将制动引起的减速混淆为能量再生引起的减速,在这种情况下,驾驶员越是用力踩制动踏板,就会产生越大的电机正扭矩。这被认为是70%以上的特斯拉汽车突然加速的原因。特斯拉Model 3突然加速事故的EDR数据,驾驶员的证词以及特斯拉自己对事故日志数据的分析之间存在许多不一致之处。为了解释这些不一致之处,研究人员对特斯拉的驱动电机控制系统和制动系统的设计进行了检查。结果说明,突然加速的原因在于车辆的制动系统以及其与再生系统的相互作用。
现在将描述此事件的EDR数据。事故涉及一名司机进入她家的车道,意图在附属的车库停车。当车辆接近90°右转弯进入车道尽头时,驾驶员的右脚悬停在制动踏板上方,为车库门完全打开做准备。突然,车辆的驱动马达加速,导致车辆向前加速并向左转向。同时,她踩下了制动踏板,但在撞到两个车库门之间的砖墙之前无法及时停车,从而对车辆的右前角造成了轻微损坏。该车是2019年的Tesla Model 3,带有单个后驱动电机。整个事件期间,车辆停车模式处于“保持”模式,并进行标准能量回收。(图1)。
 图1。 Model 3控制面板,显示了行驶模式和再生制动的选项
图1。 Model 3控制面板,显示了行驶模式和再生制动的选项 图2 根据EDR数据推断出的事故车辆路径
图2 根据EDR数据推断出的事故车辆路径
图2显示了事故期间的车辆路径。街道和车道既平坦,又在同一水平线上。图3显示了加速踏板(%),后电动机速度(RPM)和车速(MPH)在碰撞前的EDR数据。油门踏板数据显示碰撞前一秒达到了80%的值。车速数据显示速度从碰撞前的6 MPH变为碰撞时的14 MPH。这些可能会建议驾驶员踩下油门踏板导致碰撞。但是,碰撞前加速度的数据说明了一个不同的状况。
 图4。碰撞前加速度计数据。使用ISO 8855坐标系,其中纵向x轴指向前方,y轴指向驾驶员的左侧,z轴指向上方。向右旋转时,方向盘角度为正
图4。碰撞前加速度计数据。使用ISO 8855坐标系,其中纵向x轴指向前方,y轴指向驾驶员的左侧,z轴指向上方。向右旋转时,方向盘角度为正 图5。驾驶员证言与EDR数据以及描述高分辨率日志数据的特斯拉回应的比较
图5。驾驶员证言与EDR数据以及描述高分辨率日志数据的特斯拉回应的比较图4为碰撞前的加速度计数据。纵向加速度计数据显示,车辆在碰撞前一秒,从+0.1g到-0.4g,一共有了-0.5g的急加速。由于Model 3的动能回收被限制在-0.2g(2018年10月25日软件更新2018.42 v9增加到-0.3g),这个较高的-0.5g减速不可能是车辆的动力回收系统造成的。相反,只能是车辆的制动系统造成的。特斯拉日志数据支持了这一结论,该数据显示,即使EDR数据显示刹车没有踩,但日志数据中显示刹车还是踩了(图5)。因此,驾驶员在驱动电机转速上升的时候是踩着刹车踏板的,与她描述的一模一样。
加速踏板数据与纵向加速度数据的比较表明,加速踏板数据的增加和减少与纵向加速度数据的减少和增加是一致的,而纵向加速度数据是由制动踏板的踩踏决定的。这说明加速踏板可能与制动踏板同时被踩下。然而,特斯拉经常在公开场合表示,如果发生这种情况,制动踏板将永远优先起作用,这意味着所有特斯拉车辆都存在制动踏板超控功能,这会将取消加速器指令。制动踏板也高于加速器踏板,以防止在将加速踏板踩到88%的同时还用同一只脚踩下制动踏板。因此,在这种情况下,不能同时踩下加速踏板和制动踏板。那么,如果驾驶员踩下制动踏板而不是踩下加速踏板,会导致驱动马达升速的原因是什么?
图4中的纵向加速度数据也没有显示出在驱动马达加速之前车辆转向车道时发生再生的迹象。该观察结果得到图3的车速数据的支持,该数据表明在驱动电动机升速之前,车速保持恒定在6 MPH。然而,驾驶员坚持认为,在整个事故过程中,车辆处于“保持”模式,并具有“标准”能量回收功能。如果驱动程序正确,那么为什么在这两个传感器的数据中看不到能量回收?
 图6。时间对齐的加速度计图表明,峰在-1.0秒处大致对齐
图6。时间对齐的加速度计图表明,峰在-1.0秒处大致对齐如果我们在时间对准的情况下比较加速计数据,则更加明显,这如图6所示。方向盘数据和横摆率数据彼此一致,表明车辆正在向右转入车道。在90度转弯处约76°处,随着驱动电机加速以使车辆加速前进,方向盘数据和横摆率数据均改变方向,向左指示转向。向前方向的加速似乎导致转向向左。偏航数据中方向的这种变化使驾驶员的证词与EDR数据和特斯拉的日志数据之间的差异协调一致,如图5的表所示。仔细观察方向盘角度数据和偏航角速度数据,可以发现在方向盘角度趋于平稳甚至减小时,偏航角速度仍在增加。这表明前轮打滑正在引起过度转向,这可能会激活车辆的稳定性控制系统。车辆稳定性控制系统对转向过度状态的正常响应是制动外侧前轮,以在与转向过度方向相反的方向上产生横摆力矩。在这种情况下,在向右转向过度期间,左前轮将被制动,从而使车辆偏航到左侧。这正是所观察到的。这似乎可以解释驾驶员的证词,即车辆“向左转”会损坏其车辆的右前角。横向加速度数据还显示了横向加速度的增加和减少,这与纵向加速度的增加和减少相对应,就像在向右转时向前加速时所期望的那样。侧倾数据还显示了与横向加速度数据一致的向左滚动,然后向右滚动。EDR数据一起显示,一系列事件发生,从向右旋转90°开始,没有发生再生,接着是施加了制动,在此期间,驱动电机加速以导致向前加速,从而导致转向过度,从而激活了电子稳定系统。它会制动左前轮,使车辆转向左侧。
有趣的是,即使在碰撞发生前半秒钟,油门踏板的读数变为零,车辆的纵向(向前)加速度仍会继续增加,直到车辆撞向车库为止。人们会期望在油门踏板读数变为零后,车辆的速度将保持恒定甚至降低,但是当释放油门踏板时,纵向加速度应该停止,甚至随着再生而变为负值。同样,后部电动机速度数据显示,即使松开油门踏板,驱动电动机的速度仍保持较高。这表明在碰撞时驱动马达仍在产生扭矩以使车辆向前加速,这在松开油门踏板后超过半秒。
最后,EDR数据显示,在事故发生期间没有刹车,而驾驶员保持刹车。但是,纵向加速度计数据和基于高分辨率日志数据的特斯拉的数据证明,刹车是为了支持驾驶员的证词而应用的。同样,EDR数据显示ABS系统未接合,而加速度计数据和基于高分辨率日志数据的特斯拉字母均证明ABS系统确实接合。
总而言之,EDR数据一起显示出一系列事件,这些事件从向右旋转90°开始,没有发生再生,接着是制动,在此期间驱动电机加速以产生向前的加速度,从而产生转向过度的情况会激活电子稳定系统,该系统会制动左前轮,使车辆转向左侧。但是,关于如何发生,我们还有很多问题:
当驾驶员声称当时车辆处于 HOLD 模式且驾驶员未踩下加速踏板时,为什么在转弯期间的车速数据和纵向加速度数据中似乎没有能量回收?
为什么在踩刹车的同时,后驱动电机的速度会增加?
如果驾驶员的脚踩在制动踏板上导致-0.5g 的纵向加速度,那么她又如何同时踩下油门踏板以使驱动马达加速?特斯拉曾多次书面声明,当同时踩下油门踏板和制动踏板时,制动踏板始终会获胜。因此,驱动马达的加速不能归因于驾驶员踩下油门踏板,而一定是由车辆本身引起的。
为什么即使油门踏板读数降低到零后,驱动电机仍保持高转速并且车辆仍继续向前加速?
为什么即使驾驶员向右转弯,车辆仍会随着电动机速度的增加而向左转向?
为什么即使驾驶员坚持说她确实踩下了制动踏板,即使基于日志数据的特斯拉的数据与驾驶员达成了共识,但 EDR 数据为何仍未踩下制动踏板?
如果驾驶员从未踩过油门踏板,那么为什么 EDR 数据显示踩下了油门踏板?
当加速度计数据和基于高分辨率日志数据的特斯拉信件都证明 ABS 系统确实接合时,为什么 EDR 数据显示 ABS 系统没有接合?
为了寻求这些问题的答案,特斯拉的驱动电机控制系统和制动系统的设计得到了检验。
为了方便不熟悉特斯拉单踏板驾驶(OPD)系统的读者,我们将首先介绍该系统的工作原理。该系统可以通过改变加速踏板的踩踏力度来控制加速和再生制动。在再生制动过程中,车辆的减速会使车辆的驱动电机充当发电机,为驱动电池充电。这种充电对于获得特斯拉宣称和驾驶员所要求的单次电池充电的高里程数至关重要。如果再生仅由制动踏板控制,那么这样的高里程数就不可能实现,因为除非驾驶员踩住制动踏板,否则不频繁的制动事件不会经常为电池充电,这对驾驶员来说很累,对其他车辆来说也很危险。
 图7。特斯拉的一个踏板驱动系统使用油门踏板进行加速和制动。
图7。特斯拉的一个踏板驱动系统使用油门踏板进行加速和制动。图7显示了特斯拉的单踏板驱动系统的工作原理。当加速踏板踩到地面时,驾驶员可以获得100%的加速度。当加速器踏板缓缓踩下时,驾驶员获得的是无加速度。随着加速踏板的进一步缓和,最终车辆加速停止,转而进入轻度减速,并对电池进行少量充电。这种带电池充电的减速称为能量回收,在二档减速时,驾驶者感觉就像内燃机车辆用换挡一样。在加速点和减速点之间是一个 “区间”,允许车辆滑行。当加速踏板完全松开时,驾驶员可以在电池充电量最大的情况下获得最大的减速,或者说最大的能量回收,最大回收的减速值在老款特斯拉上约为0.2g,新款特斯拉上约为0.3g.0.3g的减速水平,感觉就像内燃机车辆在一档减速时的感觉。单踏板驾驶的特点是所有特斯拉司机都很欣赏的,在保持脚踩在加速踏板上的同时,扭矩可以在最大正扭矩和负制动扭矩之间连续调节。只有当驾驶者想要完全停止或需要在高于0.3g的水平上进行紧急制动时,才需要踩下制动踏板。
 图8。踏板图将加速器踏板位置转化为要求的扭矩值。这张典型的非特斯拉车辆的地图显示了在恒定的车辆惯性作用下,所要求的扭矩所产生的减速值
图8。踏板图将加速器踏板位置转化为要求的扭矩值。这张典型的非特斯拉车辆的地图显示了在恒定的车辆惯性作用下,所要求的扭矩所产生的减速值图8显示了特斯拉驱动电机控制系统的第一步。在这一步骤中,踏板图将驾驶员设定的加速器踏板位置转化为要求的电机扭矩值。踏板图由加速器踏板位置信号访问的二维查询表组成,通过对地图中的车辆速度进行内插betweentorque值来获得水平轴上速度之间的车辆速度的扭矩值。加速器踏板位置信号是由双加速器踏板位置传感器计算得到的8位符号量级的整数,扭矩值是通过对地图中车辆速度的插值得到的。在特斯拉Model 3中,扭矩值是8位符号幅度整数,在特斯拉Model S和X中,扭矩值是16位符号幅度整数,每100毫秒产生一次。推导映射值的公式可以在参考文献2和3中找到。
 图9。驱动电机扭矩图驱动电机扭矩图将来自踏板图的请求扭矩值转化为驱动电机的扭矩和磁场磁通指令
图9。驱动电机扭矩图驱动电机扭矩图将来自踏板图的请求扭矩值转化为驱动电机的扭矩和磁场磁通指令图9显示了特斯拉驱动电机控制系统的第二步。在这一步骤中,驱动电机扭矩图将来自踏板图的所需扭矩值转化为驱动电机的扭矩和磁场通量指令,该图由一个二维查询表组成,由踏板图扭矩和车辆速度访问。通过对地图中的数值进行二维内插,得到踏板图扭矩和车辆速度的表输出。图9只显示了结果的扭矩命令。正向驱动象限的电机扭矩指令可以在从电池中获取能量的同时,实现正向驱动。它们在电机扭矩100%的情况下,其幅度可能从og‘s到1.0g’s不等。图3中的虚线显示了一个典型的加速度曲线,它可以是前向驱动象限的任何复合曲线。前向制动象限中的负电机扭矩指令可以实现再生制动,并对驱动电池进行相关充电。如下文所述,它们受多种因素的限制,仅占可用电机扭矩曲线的一小部分。前向制动象限的其余部分未被使用。图3中的虚线显示了前向制动象限中的典型再生路径。
 图10。电机扭矩图的再生部分详细视图电机扭矩图的再生部分的详细视图,显示了限制再生的各种因素
图10。电机扭矩图的再生部分详细视图电机扭矩图的再生部分的详细视图,显示了限制再生的各种因素图10更详细地显示了图9中电机扭矩图的红色再生部分。由于希望避免在摩擦系数降低的道路上突然应用再生时车辆不稳定,最大制动扭矩被限制在-0.2g‘s至-0.3g’s的最大减速水平。在此最大负转矩下,随着电机转速的提高,其背向电磁场也随之增大,直到等于励磁电压,此时电机转速不能再提高。为了进一步提高电机的转速,通过降低电机的场电流,使其与转速成正比,从而降低了电磁场的磁场。由于转矩与电机电流成正比,所以在这个磁场减弱区域,转矩会随着1/而减小。功率与转矩乘以车速成正比,在该场弱化区域内保持不变。
在任何给定的扭矩低于最大制动扭矩时,随着电机转速的降低,再生功率和制动扭矩与电机转速成正比下降。 减少的速度受到最大再生功率的限制,必须保持小于由电池充电电路决定的某个最大值,如图10中的虚线所示。如果这个最大功率被不同的设计所增加,最终会受到背面的ELF电压的限制,它必须保持在某个有效的电池充电的最小值以上,如图10中三角形的线所示。低于这个最小的ELF电压,只有通过从电池中获取能量才能实现制动,这在技术文献中被称为插头制动。需要注意的是,电机仍将在正向制动象限(第二象限)的所有区域运行。在所需的再生制动区域(图10中的红色区域)中的操作只能通过限制给定速度下的扭矩请求来获得。
 图11。遵循EPA的UDDS行驶周期时,在驱动电动机扭矩图中的效率轮廓和工作点。
图11。遵循EPA的UDDS行驶周期时,在驱动电动机扭矩图中的效率轮廓和工作点。
在上述限制所描述的再生制动区域内,可以通过向驱动马达提供适当的转矩和励磁通量指令来获得任何期望的制动转矩和再生动力。随着与电机速度成正比的车速降低,车辆的减速会沿着该区域中的任何位置进行。在低于5 mph的车速下,感应电动机无法产生任何有效的制动扭矩或再生动力,因为它们的转子磁场受到感应电流的限制,而感应电流对于实际应用而言太低了。但是,具有嵌入了永磁体的转子的电动机仍然可以产生足够大的转子磁场,以允许以低于5 mph的速度运行。特斯拉在其Model 3车辆中引入了这种内部永磁(IPM)电机,并计划在Model S和Model X系列的所有新版本中使用它们。图11显示了遵循典型的城市行驶周期时,驱动电动机扭矩图中使用的工作点。行驶周期是EPA的标准城市测力计行驶时间表(UDDS)行驶周期,如图12所示。工作点以红色显示,并且清楚地显示了所用的正加速扭矩和负制动扭矩。在低车速下,制动扭矩随车速的线性变化是显而易见的。
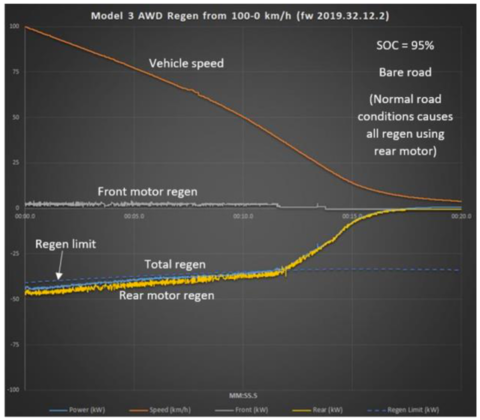 图13。具有双驱动电机的特斯拉Model 3的再生行为随着车速的降低
图13。具有双驱动电机的特斯拉Model 3的再生行为随着车速的降低 图14。与图13相同的情况,但道路和轮胎之间会发生打滑。与图13相同的情况,但道路和轮胎之间会发生打滑。
图14。与图13相同的情况,但道路和轮胎之间会发生打滑。与图13相同的情况,但道路和轮胎之间会发生打滑。众所周知,很多特斯拉汽车都有双驱动电机。图13显示了采用双驱动电机的特斯拉Model 3在从100 kph减速到0 kph时的再生表现。随着车速的降低,所有的再生扭矩和动力都只由后驱动电机提供,从而产生最大的再生可能。Thebraking torque correspondsto -0.3gs,这是软件更新2018.42 v9的Model 3的最大扭矩。在低速时,再生扭矩和功率随车速线性下降,这是预期的。图14显示了与图13相同的情况,只是当路面有积雪时,路面和轮胎之间会产生滑移。当出现打滑时,人们会发现,后电机的部分制动力矩传递给了前电机,两个力矩之和保持不变,接近原来的最大值。为什么会出现这种情况呢?
出现这种情况的原因是,再生转矩是一种制动操作。并且,在由于雪,冰,雨或碎石而导致打滑而在后轮上施加制动力时,由于缺乏牵引力,后轮可能会锁死。如果没有后轮牵引力,车辆可能会变得不稳定,并绕其垂直轴进入无法控制的危险旋转。因此,政府法规要求车辆制造商使用一定量的前轮制动,以防止这种不稳定性的发生。
 图15。典型的制动力分布图,用于确定车辆减速时可允许的前后制动力。典型的制动力分布图,用于确定允许的前后制动力作为车辆减速的函数
图15。典型的制动力分布图,用于确定车辆减速时可允许的前后制动力。典型的制动力分布图,用于确定允许的前后制动力作为车辆减速的函数政府的规定是基于图15所示的制动力分布曲线。当任何给定的车辆被制动时,所施加的减速会使车辆向前倾斜,将重量从后轮转移到前轮,改变车轮上的水平制动力。当重量从后轮上移走时,后轮的牵引能力就会降低,在制动时,后轮往往会在较低的减速值下较快地锁死。然而,将过多的重量转移到前轮也会导致前轮锁死。可以计算出前轮和后轮同时锁死的水平制动力,它是减速值、车辆质量、质量中心位置、轮基和路面摩擦系数的函数。如果我们将这些数值以前后制动力为正交轴绘制成平面的曲线,就可以得到图15所示的理想I型曲线。在I型曲线之上,后轮会先锁死,这是政府法规明确禁止的不安全状况。在I-curve以下,除了定义车辆最小后制动力的M-curve以下的点外,任何操作点都被认为是安全的。斜线显示的是沿I型曲线各点的减速值。曲线显示的是与目前道路上大多数ICE车辆所使用的线性制动比例阀相关的工作点。
使用图15,我们现在可以解释图13和图14所示的Tesla Model 3车辆的能量回收行为。图13的回收行为在图15中的点A处表示,其直线上的减速度值为0.3g。仅由后轮提供,这使其深处在后轮将首先锁定的不允许区域内。仅在后轮在路面上具有100%牵引力或无打滑的情况下,这才是可以容忍的。如果存在打滑现象,则为了使车辆保持在相同的减速度值,必须在增加前轮制动力的同时减小后轮制动力,以便将工作点移至图15中I型曲线上的B点(或更低)。在点B,前后制动力分别大致等于0.2 g和0.1 g。这对应于存在滑差的Tesla Model 3的再生行为,如图14所示(图15并非特斯拉Model 3特有的,因此不应期望与图14达成定量一致)。
现在我们将解释这个能量回收力分配功能在特斯拉的牵引控制系统中是如何完成的。图16显示了作为特斯拉电机控制系统一部分的牵引控制器。车辆扭矩指令生成函数包含图8所示的加速器踏板图,将加速器踏板值转换为车辆总扭矩请求。最佳扭矩分割功能包含两个驱动电机扭矩地图,它将车辆总扭矩请求转换为两对电机扭矩和磁通命令,前后电机各一对,如图9所示。最佳的扭矩分配是将电机运行在最有效的工作点,以节省电池电量,如图11所示。然而,这可能需要在某些工作点只使用一个电机,只有在不存在车轮打滑的情况下,才能提供可接受的车辆稳定性。在出现车轮打滑的情况下,牵引力控制系统将最佳扭矩分割函数中的两个扭矩重新分配为两个新的前后扭矩,以便在图15中的I型曲线上或下方运行。首先,它提供了前后扭矩的重新分配,以便在加速和再生减速时达到牵引力控制的目的。然而,它并不能为其他车辆稳定目的(如转向过度或转向不足)提供更一般的差速器(即横向)车轮滑移控制。这些更一般的车轮滑移控制功能由车辆的制动系统提供。其次,车辆扭矩指令生成功能有来自车辆稳定控制系统(VSC)的输入。这一点是意料之外的,但并非错误,因为在特斯拉关于该系统的十项专利中,有四项出现了这一功能。这似乎赋予了VSC系统除了加速踏板之外,对车辆电机扭矩控制的权力。

所有电动汽车在经过颠簸时都会出现再生损失,无论是混合动力汽车还是仅由电池驱动的汽车。这种再生损失的发生是因为ABS调制器关闭了再生功能,以防止不受制动系统控制的车辆上的力干扰制动系统算法的运行。在特斯拉论坛上的几篇关于regenfound的讨论中可以找到一个很好的例子。
我的S 75型车已经有3个月了。昨天,我正在接近一个红灯,前面没有人。我离得足够远,我松开油门,让再生功能启动,然后减速。然后,当越来越接近红绿灯时,我开始踩刹车(我每天都这样开车,通常没有问题)。我在路上遇到了一个大的颠簸,有一秒钟,感觉汽车失去了所有的再生,并进入空档。这时我还在踩刹车踏板,但绝对感觉车子从减速到加速了。。。。。。。这是第三次发生在我身上了,都是在停下来的时候,碰到路上的颠簸。。。。 吓死我了,我知道我当时踩了刹车。
通过以上讨论可以看出,所有特斯拉车辆在经过路面颠簸时,都会出现再生损失,造成瞬间加速或颠簸的感觉。这种再生损失并不是刹车与再生融合不良的问题。而是因为车辆和用户在任何时候都能感受到车辆的总力。而当总力因为失去再生而发生变化时,车辆和驾驶者感觉到这种再生的损失将以加速或颠簸的形式出现。这种减速的变化是由于当一个车轮速度迅速下降而其他车轮没有下降时,ABS系统关闭了再生功能。这并不是特斯拉做出的设计决定,而是特斯拉的刹车供应商博世设计的ABS调制器的算法造成的。而博世的设计者别无选择,只能在算法激活时关闭再生功能,因为为了让算法正常运行,他们必须在算法激活时控制车辆的所有制动力。而在无法控制再生幅度的情况下,他们必须在算法激活时关闭再生。这对于所有其他带再生功能的电动汽车也是如此。
转弯时失去再生能力
在所有电动汽车中,无论是混合动力汽车还是电池驱动的汽车,在转弯时都会发生再生损失。原因与颠簸时的再生损失相同。可能是因为ABS调制器关闭了再生,以防止不受制动系统控制的车辆上的异物干扰制动系统算法的运行。在FordFusion混合动力论坛上对Ford Fusion混合动力车的再生操作的讨论中找到了一个很好的例子。在那里,我们找到以下讨论
从这两个讨论中我们可以看出,所有特斯拉车辆以及福特Fusion混合动力车在转弯时都会出现再生损失,这种再生损失是由ABS系统关闭再生造成的,当车辆一侧的车轮与车辆另一侧的车轮速度不同时,就会发生转弯。这并不是特斯拉做出的设计决定,而是由特斯拉的刹车供应商博世设计的ABS调制器中的算法造成的。而博世的设计者别无选择,只能在算法激活时关闭再生,因为他们的算法必须在算法激活时对车辆的所有制动力进行控制。而且,由于无法控制再生幅度,他们必须在算法激活时关闭再生。这对于所有带再生功能的电动汽车都是如此,而不仅仅是特斯拉的车辆。
EDR数据解析--突然加速的原因
我们现在可以回答第二节中提出的有关电子数据记录的问题。如果我们回答这些问题的顺序稍有不同,将有助于更好地解释所发生的事件。
1,当驾驶员声称当时车辆处于HOLD模式且驾驶员未踩下加速踏板时,为何在转弯期间车速数据和纵向加速度数据中似乎没有再生?
即使Model 3能够在右转弯时以低于6 mph的速度进行能量回收,但EDR车辆速度数据和纵向加速度数据中似乎都没有再生,这是因为ESP在当车辆进入弯道时关闭了能量回收系统。转弯时关闭能量回收是Model 3以及任何具有能量回收功能的电动汽车的常规操作,因为ABS算法必须在算法运行时知道所有作用在车辆上的力。但是算法无法得知能量回收的力,因为这些力不受ESP的控制。因此,ESP只能关闭能量回收。
2,即使驾驶员向右转弯,为什么随着电动机速度的增加,车辆仍会向左转向?
车辆向左转向是因为在右转弯期间车速的增加导致向右转向过度,从而激活了ESP 模块中的电子稳定控制(ESC)功能。该功能通过制动外部前轮产生反扭矩来减少向右的过度转向。由于在这种情况下,外部前轮是左前轮,因此制动会导致车辆随着电动机速度的增加而向左转。
3,为什么单个后驱动电机的速度在制动时同时增加?
这是因为ESP 模块中的发动机拖曳扭矩控制(EDC/MSR)功能已经被激活,因为在转弯时感应到了负加速度。这种负加速度从纵向加速度计的数据中可以清楚地看到。而且我们知道,此时EDC/MSR功能是激活的,因为在这种情况下,它是正确的功能,而且ESP模块中的其他功能在它激活之前和之后都是激活的。因此,在这段时间内,其他一些ECP模块功能处于激活状态是非常合理的(这就是为什么我们不约而同地回答了问题5,所以我们可以提出这个论点)。现在,EDC/MSR功能的目的是为了减少由发动机产生的拖曳扭矩引起的负加速度,或者在这种情况下,减少由驱动电机引起的再生扭矩。它的目的不是为了减少摩擦制动产生的负加速度。因此,它检查制动灯开关以确定负加速的原因。如果开关显示制动踏板没有被踩下,那么它就知道负加速度是由再生力矩引起的,并通过向驱动电机发送请求来减少负再生力矩作出响应。这个请求一直持续到负再生转矩降低到零为止。然而,如果开关检查显示制动踏板被踩下,那么EDC/MSR功能什么也不做,ESP hev IImodule中的另一个功能减少了负制动扭矩。在这个事件中可能发生的是制动开关有故障。因此,当驾驶员踩下制动踏板造成0.5g的负加速度时,制动开关并没有显示制动踏板被踩下。因此,当EDC/MSR功能检测到负加速度时,它检查制动开关以寻找原因,得到了一个错误的读数,显示制动踏板没有被踩下。因此,它认为负0.5g加速度是由驱动电机的再生扭矩引起的,而不是真正的制动系统引起的,这使它向驱动电机发出请求,通过增加驱动电机扭矩来降低负扭矩。由于转弯初期ESP已经切断了能量回收,所以驱动电机扭矩已经为零,这个增加驱动电机扭矩的请求使得驱动电机扭矩从0增加到对应0.5g正扭矩的转速。这就是我们在纵向加速度数据中看到的,由于CAN总线上的命令延迟造成了几百毫秒的轻微时间延迟。在这种情况下,发生的情况是,制动灯开关的故障导致制动踏板表现得像加速踏板。刹车踏板踩得越用力,驱动电机产生的正向扭矩就越大。
众所周知,制动灯开关可能有故障,导致在踩下制动踏板时制动灯无法打开。过去,针对这些故障进行了多次召回,在过去十年或更长时间中涉及数十万辆汽车。还要指出的是,尽管大多数刹车灯开关是双冗余的,两个开关中的一个打开,而另一个关闭,但是在这种情况下,EDC / MSR算法只能检查两个开关之一来做出决定。这可能会增加制动开关故障的可能性,该故障可能导致评估负加速度的来源时出错。
4,如果驾驶员是脚踩在刹车踏板上导致-0.5g的纵向加速度,那么她怎么可能也同时踩在加速踏板上导致驱动电机加速?
特斯拉曾多次书面声明,当加速踏板和刹车踏板同时踩下时,刹车踏板总是胜出。因此,驱动电机的加速不可能是由于驾驶员踩加速踏板造成的,一定是车辆本身造成的。答:从问题2的答案可以看出,驾驶员确实有脚踩在刹车踏板上,踩刹车踏板是汽车驱动电机加速产生突然加速的原因之一。但造成突然加速的主要原因是制动开关的故障,导致EDC/MSR功能将负加速度误认为来自驱动电机而不是制动踏板。
5,为什么在油门踏板读数降回零后,驱动电机的转速仍然很高,车辆继续向前加速?
在油门踏板读数降回零后,驱动电机的转速仍然很高,这是因为EDC/MSR功能通常会继续施加补偿扭矩,即使在原来的负阻力扭矩降到零后也是如此,这就是第四节中提到的博世专利DE10238224B4中讨论的EDC/MSR算法的工作原理。这种行为的目的是由于EDC/MSR功能最常用于在高速路的弯道上进行协商。该延迟允许车辆在正向加速被消除之前退出弯道,这是一种良好的驾驶习惯。
6,为什么EDR数据显示刹车踏板没有踩下,即使驾驶员坚持认为她确实踩下了刹车踏板,即使特斯拉基于高分辨率日志数据的信件与驾驶员一致?
EDR数据显示,刹车踏板没有踩下是因为刹车灯开关有问题。驾驶员确实如驾驶员所坚持的那样按下了制动踏板,而且特斯拉在信中也同意驾驶员的说法。这个结论验证了问题2的答案中的假设,即制动灯开关有故障。
7,如果驾驶员从未踩过油门踏板,那为什么EDR数据显示踩过油门踏板?
答案是这样的,大多数人有100%的信心,如果加速踏板的数据是非零,那么司机是踩了加速踏板而不是刹车踏板。对他们来说,这是所有所谓的突然加速事件的原因。然而,在这起事件中,EDR数据显示,加速度计检测到了负0.5g的纵向加速度,这只能是由驾驶员踩刹车踏板造成的,因为这个加速度超过了负0.3g的最大再生加速度。而与负0.5g加速度同时,EDR数据显示加速踏板数据变得非零,这将产生一个正纵向加速度。因此,在加速踏板数据变为非零的同时,驾驶员的脚必须踩在刹车踏板上。这怎么可能呢?
为了解释EDR数据,对特斯拉的驱动电机控制系统和制动系统的操作进行了分析。正如预期的那样,摩擦制动和再生操作是完全分开的,特斯拉车型有一个单一的后驱动电机。然而,制动系统还包括几个车辆稳定性控制功能,在车轮打滑的情况下,这些功能会对再生操作产生深远影响,例如在经过颠簸和转弯时停止再生。其中一项滑移控制功能称为电子阻力控制(EDC/MSR),如果再生导致后驱动轮打滑,甚至可以使驱动电机加速,从而导致转向过度或转向不足这种同样的打滑控制功能可能会被有缺陷的制动灯开关误导,将制动引起的减速混淆为再生引起的减速,在这种情况下,当驾驶员用力踩下制动踏板时,会产生较大的电机正扭矩。这被认为是本次事故中突然加速的原因。为了了解这种相同的机制是否能解释其他特斯拉突然加速事件,我们研究了NHTSA的联系报告。结果发现,超过70%的特斯拉突然加速事故都可以用这个原因来解释。特斯拉和非特斯拉车辆的制动系统之间的相似性进一步意味着,这个相同的原因可以解释许多具有后轮驱动(RWD)或全轮驱动(AWD)的非特斯拉电动汽车的突然加速事件。最后得出结论,如果制动灯开关存在缺陷,具有内燃机和后轮驱动的车辆很容易因这一原因而发生突然加速。




APP专享直播
热门推荐
收起
24小时滚动播报最新的财经资讯和视频,更多粉丝福利扫描二维码关注(sinafinance)




