

Google为Pixel更新HDR,夜间拍摄无「鬼影」,每个像素都是细节
来源:新智元
HDR是数字摄影中一项重要的技术,意为「高动态范围」。HDR技术可以克服多数相机传感器动态范围有限的缺点,并将图片色调控制在人眼识别范围之内,HDR简单的说就是让你的照片无论高光还是阴影部分细节都很清晰,不用担心过曝和欠曝。
目前常用的合成高动态范围图像的方法是多重曝光的图像合成,该方法的关键是:
1、曝光包围(Exposure bracketing):拍摄多个不同曝光的LDR图像
2、合并(Merging):将它们合并到一个HDR图像

传统的摄影需要自己手工来设置相机参数来调整曝光,更费时。而HDR技术主要就是保留这种复杂场景下的高动态,免去手工操作。
1、在保持手机Pixel相机的快速,可预测的拍摄体验的同时,捕捉额外的长时间曝光帧。
2、充分利用长时间曝光的帧,同时避免由于帧之间的运动而导致的重影伪影。
之前Google的HDR技术是基于曝光不足,从而保留了亮部的细节,但却会增加阴影部分的噪点。这种方法适用于动态范围适中的场景,对于极端场景来说不太适用。

HDR成也连拍,败也连拍
一个常见的噪点叫Shot noise,与光的粒子性质有关,每拍一张照片,根据曝光时间和光线总量,都会引入噪点。
在连拍过程中还会引入第二种噪点Johnson–Nyquist noise,这种噪声不取决于捕获的光量,而是取决于所拍摄的帧数,连拍越多,噪点越多。
这就是为什么拍一张照片总比拍多张照片去噪点效果更好。

那bracketing连拍方法是不是就不能用呢?非也。
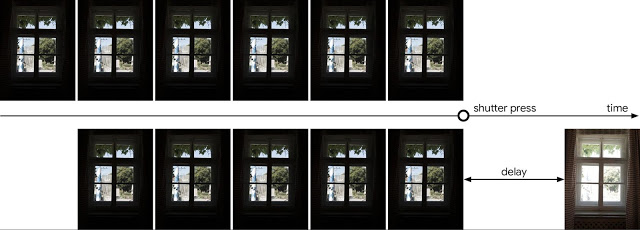
首先,重新设计连拍的捕获光线的策略。零快门滞后(ZSL)就是这样一种技术,为Pixel上的快速捕获奠定了基础。ZSL在取景器中显示的帧是快门按下之前用于HDR合并的帧。为了进行包围曝光,我们在快门按下后拍摄了另外一个较长的曝光框,该框未在显示器中显示。快门按下后将相机静止不动半秒以适应长时间曝光也可以帮助改善图像质量。
对于夜间模式来说,取景器不受捕获策略的限制,因为在取景器停止时按下快门后会捕获所有帧,因此此模式可以轻松捕获更长的曝光帧。在这种情况下,HDR捕获了三个长时间的曝光以进一步降低噪音。

合并算法
合并连拍的镜头时,我们选择短帧之一作为「参考帧」,以避免潜在的剪辑高光和运动模糊。在合并之前,所有其他框架都与此框架对齐。这就带来了新的挑战,对于复杂的场景运动或遮挡区域,不可能找到完全匹配的区域,并且在这种情况下,合并算法可能会产生重影伪影。

为了解决这个问题,Google设计了一种新的空间合并算法,类似于Super Res Zoom所使用的算法,该算法决定每个像素是否应该合并图像内容。这种去鬼影对于具有不同曝光量的帧更为复杂。
长曝光框具有不同的噪声特性,剪裁的高光和不同数量的运动模糊,这使得与短曝光参考框进行比较更加困难。
此外,重影伪像在包围曝光的镜头中更明显,因为可以减少掩盖这些错误的噪声。尽管存在这些挑战,但是我们的算法对这些问题的抵抗能力与原始HDR +和Super Res Zoom一样强大,并且不会产生重影伪影。
同时,它合并图像的速度比以前的图像快40%,因为它可以在摄影初期就合并RAW图像。
参考资料:
https://ai.googleblog.com/2021/04/hdr-with-bracketing-on-pixel-phones.html

(声明:本文仅代表作者观点,不代表新浪网立场。)

作者简介
作者文章
推荐阅读
- 北清华南复旦,中国南派芯片群英谱
-

- 我们通过梳理公开信息,挖掘半个多世纪前的半导体建设故事,以便还原这张“复旦大学造芯图谱”。详细>>
- 橱窗中的新能源汽车:一场新型消费业态的加速更迭
-

- 一切的变化,都要从新能源汽车崛起之势说起。详细>>
- 搞促销、割韭菜,谁玩“坏”了盲盒生意?
-

- 来自潮玩界的一把火,把盲盒游戏扩展到各行各业。详细>>
- 马化腾新开一局:张小龙在微信守家,姚晓光去QQ打野
-

- 在以社交为基因发展起来的腾讯,一种有别于张小龙的,带有姚晓光个人色彩的编码,即将注入到腾讯的社交逻辑中。详细>>