




在设计高端模拟与射频(RF)电路时,噪声控制至关重要。在数字领域,设计人员通常通过增加接地层、缩短高速走线、在芯片电源引脚附近放置去耦电容来抑制噪声。
然而,高性能模拟设计的噪声容限要严苛得多。在这类场景中,最重要的性能指标 —— 例如信噪比(SNR)、误码率(BER)、相位噪声和时序抖动 —— 都会随噪声大小而变化。
难点在于,相当一部分噪声直接来源于半导体器件本身,因此无法避免。最终,器件噪声决定了电路性能的理论极限。
这个问题在对噪声敏感的模拟电路架构中尤为突出,包括基于最先进 CMOS 工艺节点的电路;在这些工艺中,电源电压不断降低、工作频率不断升高,留给设计的裕量极小。这类设计中的复杂模块,包括模数转换器(ADC)、锁相环(PLL)、发射与接收(Tx/Rx)链路以及高速 SerDes,都工作在这些极限附近。因此,它们都容易受到器件噪声的影响,而这类噪声通常具有强瞬态特性。
瞬态噪声分析在模拟设计中至关重要,它可以仿真电路对随机器件噪声的响应。与传统的瞬态电路仿真不同,瞬态噪声仿真会对电路元件的固有噪声进行建模。更具体地说,瞬态噪声仿真包含非理想电阻的热噪声,以及 MOS / 双极型器件的噪声源(1/f 噪声、MOS 栅极热噪声和双极型散弹噪声)。
在进行瞬态噪声仿真时,必须为噪声源的最小、最大频率以及仿真精度指定参数。正如参考文献 1 所述,瞬态噪声仿真的精度高度依赖这些参数。
仿真能够捕捉的最低频率由仿真结束时间 TSTOP 决定。因为周期大于 TSTOP 的频率分量无法在仿真数据中包含完整周期,所以这些频率分量的幅度无法被准确计算。因此,噪声源最小频率的合理取值为 1/TSTOP 赫兹。
为了理解瞬态噪声仿真中设置最大噪声频率上限的必要性,可以考虑电阻热噪声对电路仿真器的影响。如果不对最大噪声频率加以限制,电路仿真器必须采用的时间步长(即时间步)会趋近于零,因为要包含噪声的高频分量就必须使用极小的时间步。因此,必须设置最大噪声频率,将最小仿真时间步限制在合理范围。
很多时候,对于线性与非线性电路,最大噪声频率应该设多高并不直观。如果将最大噪声频率设得过大,仿真器就必须使用小时间步来生高频噪声,进而延长仿真时间,并增大仿真器输出文件的体积。
反之,如果将最大噪声频率设置过低,则可能无法准确估算电路噪声。这是因为所有高于指定最大噪声频率的噪声分量都不会被包含在内。
选取恰当的平衡点,才能从仿真结果中得到准确的噪声指标估算。
线性与非线性电路的瞬态噪声仿真
如果被分析的电路是线性的 —— 例如工作在线性区的放大器 —— 瞬态噪声频率会与噪声源频率一致,只是被电路的增益与带宽整形。
噪声频率不会发生频率搬移。因此,提高噪声源最大频率不会对低频噪声产生影响。于是,合适的最大噪声频率由所需噪声测量的带宽决定。如果最大瞬态噪声带宽超过噪声测量带宽,就不会对测量结果产生影响。
如果电路是非线性的,那么瞬态噪声源就会发生频率搬移,并在与输入激励频率、噪声源频率相关的频率上引入噪声分量。根据噪声源带宽相对于激励频率的大小,噪声源频率可能从高频混叠到低频。
非线性电路的情况正是量化输入激励频谱分量的动机所在。原因是,只有输入激励中幅度较大的频率分量才会导致瞬态噪声频率搬移与潜在混叠。如果你能估算出输入激励的频谱带宽,就可以选取合适的噪声源最大带宽,从而准确估算瞬态噪声。
带随机噪声的调幅方波的影响
当周期性方波被调制信号进行幅度调制时,调制信号的频谱会被搬移到方波的各次谐波以及可能的直流分量上。
图 1 给出了有限带宽(fn)噪声的频谱、基频为(fpulse)的方波(含可能的直流分量)以及 fpulse 所有谐波的频谱。
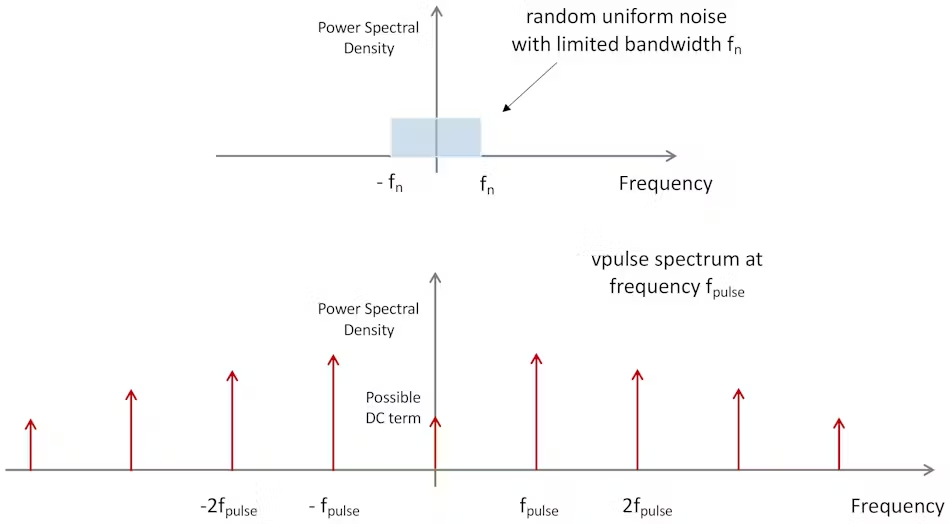
1.带宽为 fn 的噪声信号与基频为 fpulse 的方波的频谱。
当噪声频谱对方波进行幅度调制时,调幅后的频谱会与图 2 或图 3 相似。如果噪声带宽(fn)小于 fpulse 的 50%,噪声频谱以各次谐波为中心,且不会延伸到相邻谐波(图 2)。
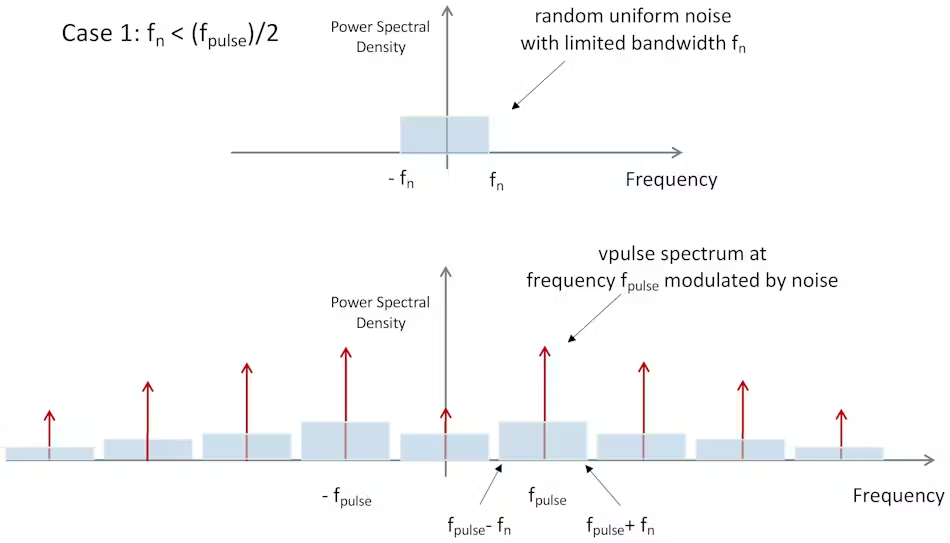
2. fn < fpulse/2 时的调幅频谱。
但是,如果噪声带宽超过 fpulse 的 50%,则如图 3 所示,频谱会出现重叠区域,噪声不仅会影响其所在中心的谐波,还会影响相邻谐波。
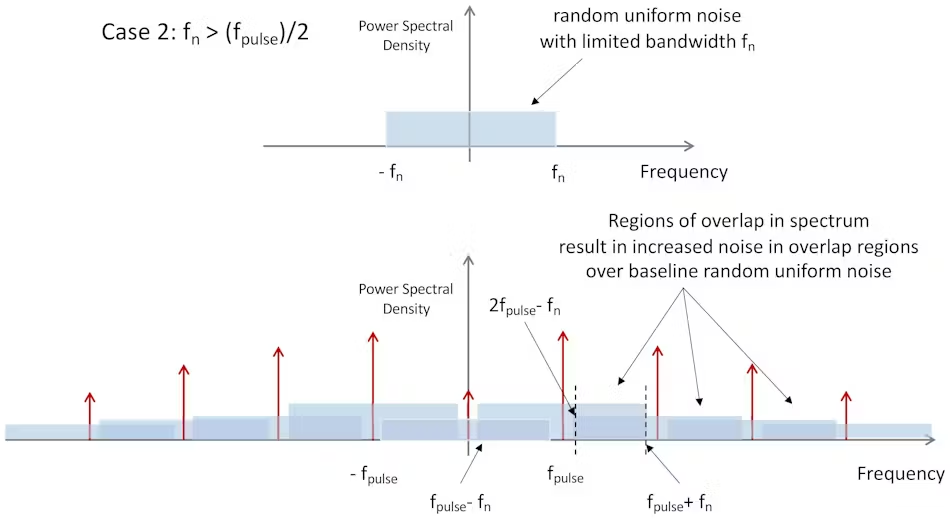
3. fn > fpulse/2 时的调幅频谱。
该示例说明了瞬态噪声仿真中最大噪声频率的影响。由于噪声源会对输入激励进行幅度调制,调幅后频谱的噪声取决于噪声带宽相对于输入激励的大小。超过输入频率 50% 的噪声带宽会混叠到低频,从而增大低频噪声。
如果瞬态噪声带宽包含输入激励所有幅度较大的谐波,瞬态噪声仿真结果就能准确估算混叠后的低频噪声。但是,如果噪声带宽小于输入信号有效谐波对应的带宽,仿真结果可能无法准确估算低频噪声。
用仿真与示例波形封装器件噪声
为了研究低频噪声幅度随输入噪声带宽变化的关系,本文使用参考文献 2 所述程序,对 6 个 100 MHz 示例方波波形进行幅度调制,调制信号为均值随机噪声,调制系数为 0.25。
图 4 给出了这 6 个波形各自谐波的相对功率。以 20 dB 为指标定义频谱带宽,每个波形的带宽由红色与白色阴影区域的边界标出。
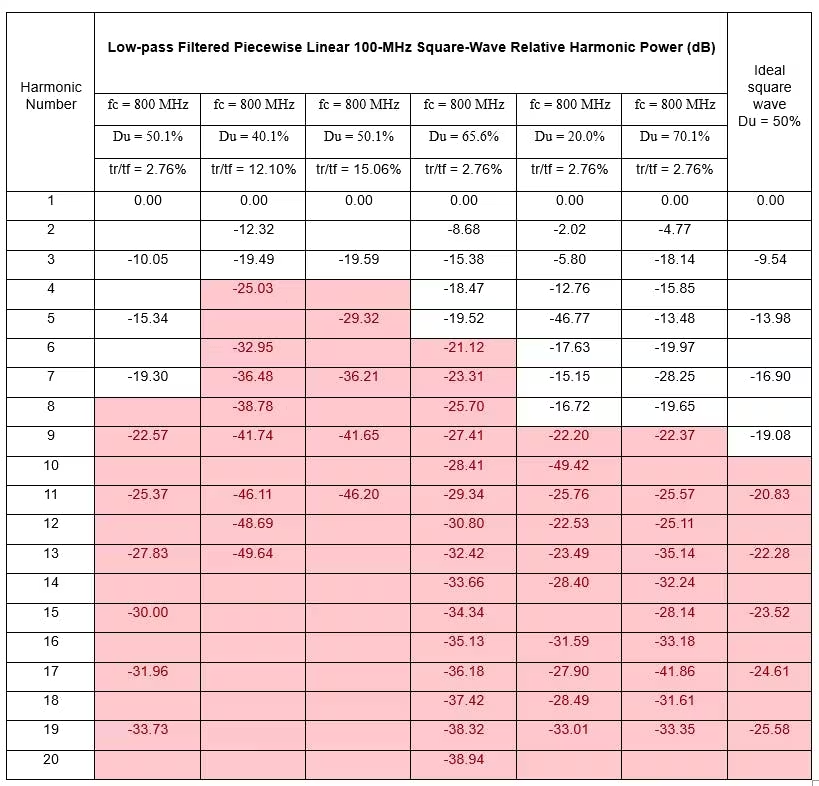
4. 六个 100 MHz 示例方波的谐波相对功率。
值得注意的是,随着占空比失真增大,偶次谐波功率显著增加。本质上,存在较大占空比失真的方波,其有效谐波数量是几乎无失真波形的两倍。
占空比为 20% 和 70% 的两个波形还使用高斯随机噪声(代替均匀随机噪声)进行调制,调制系数为 0.10,最终一共得到 8 个仿真调幅波。
均匀噪声或高斯噪声的带宽在 10 MHz 到 8 GHz 之间变化,并计算每个调幅波形的功率谱密度。通过对 90 MHz 内(不含直流)的功率谱密度积分,计算出低频均方根噪声,以量化均方根噪声与输入噪声带宽之间的关系。
由于幅度调制会带来波形的相位调制,因此还计算了每个调幅波形的时间间隔误差(TIE)及其相位噪声。在时域与频域分别求出各自的均方根抖动,并将其与输入噪声带宽作图。
图 5 给出了其中一个 100 MHz 方波分别被带宽为 30 MHz 和 300 MHz 的均匀噪声调幅后的功率谱密度。30 MHz 和 300 MHz 这两个输入噪声带宽分别对应图 2 和图 3 中的示例情况,即噪声带宽分别小于和大于方波基频的一半。
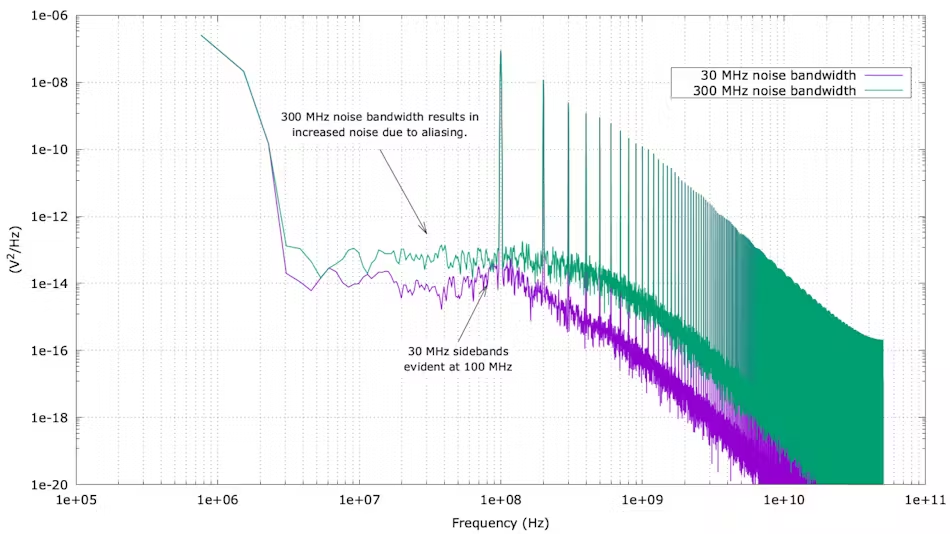
5. 被 30 MHz 与 300 MHz 随机均匀噪声调幅的 100 MHz 方波的功率谱密度示例。
与被 30 MHz 均匀噪声调制的 100 MHz 方波频谱相比,图 5 展示了由混叠带来的额外低频噪声。
电路中的噪声:瞬态噪声带宽如何影响电压噪声
下一步是分析仿真结果。图 6 给出了 8 个调幅方波各自的积分电压噪声。随着噪声带宽增大,积分值会趋近于不同的渐近值。此外,当数值达到渐近值时,噪声带宽各不相同。
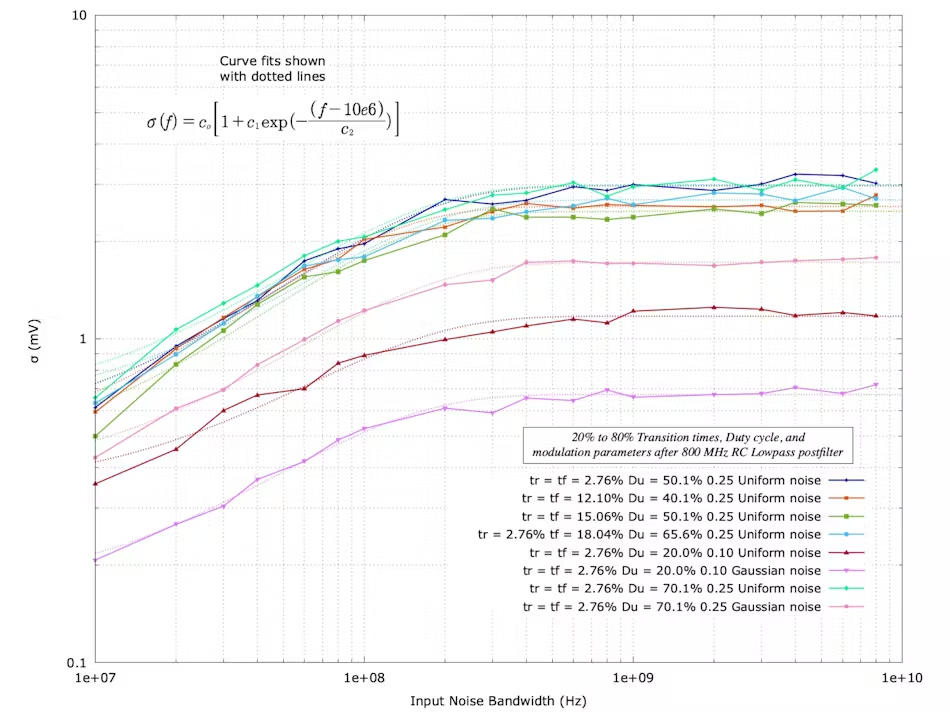
6. 积分均方根电压噪声与输入噪声带宽的关系。
图 6 中的虚线是使用图中给出的公式对各组数据进行的曲线拟合,包含系数 C0、C1 和 C2。
将曲线拟合结果归一化到其最大渐近值,得到图 7 所示的 x 轴与 y 轴放大视图。
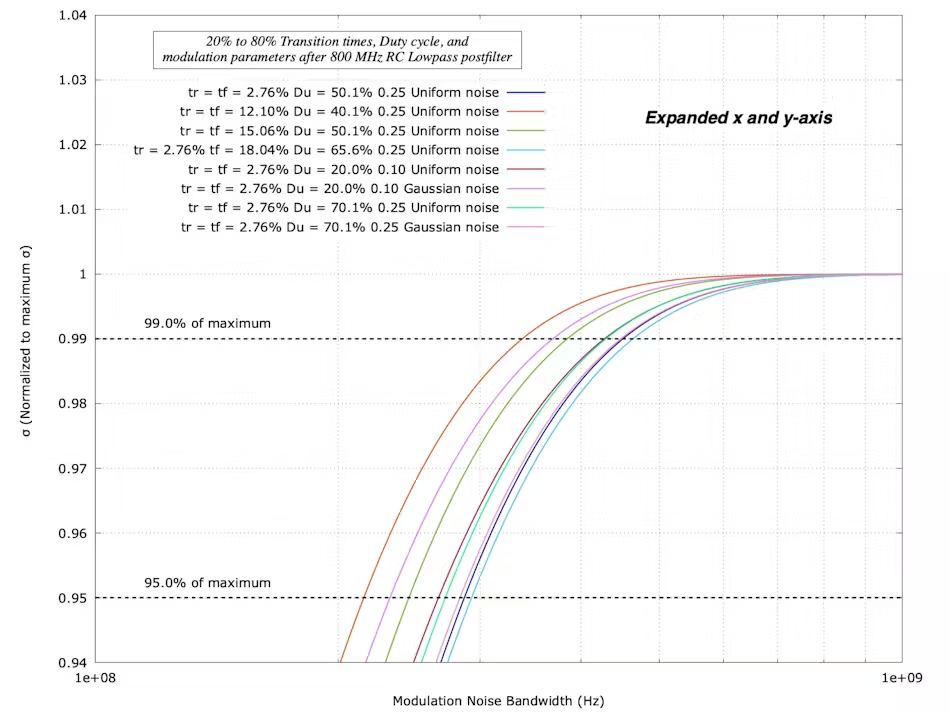
7. 输入噪声带宽对归一化均方根电压噪声的影响。
图 8 给出了各波形的曲线拟合系数,以及对应其渐近均方根噪声电压 95% 和 99% 的噪声带宽频率,同时附上了图 4 中各波形−20 dB 阈值频谱带宽。
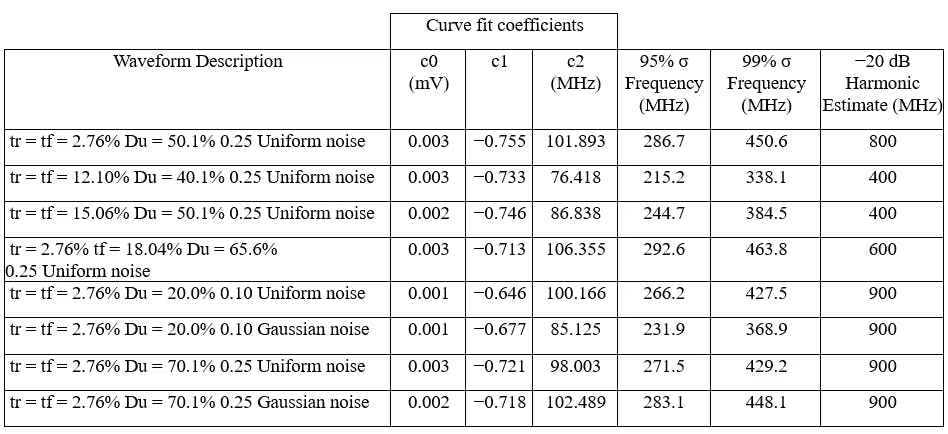
8. 电压噪声曲线拟合系数以及对应其均方根值 95% 和 99% 的频率。
为了估算仿真的最大噪声频率,合理的做法是将每个波形的−20 dB 谐波阈值与对应其渐近均方根噪声 99% 的频率进行比较。在这种情况下,最大瞬态噪声带宽应设置为:瞬态信号中谐波功率比基波功率低 20 dB 以上所对应的频率,或高于该频率。
选取更小的最大瞬态噪声带宽会导致均方根电压产生超过 1% 的误差。
相位噪声的产生及其与瞬态噪声带宽的关系
上一节重点讨论了从低频到调幅方波基波频率范围内,瞬态噪声带宽与均方根电压噪声之间的关系。
然而,幅度调制同样会产生相位噪声。当幅度变化对阈值过零点产生调制时,就会引入相位噪声。幅度到相位噪声的传递函数与频率相关。在高于信号或系统主导时间常数倒数的频率上,传递函数的幅度会下降。
那么,最大瞬态噪声带宽的选取值与它所产生的相位噪声估算精度之间有何关系?为回答这一问题,后续进行了一组仿真,以明确为准确估算相位噪声,瞬态噪声仿真应采用的合适最大瞬态噪声带宽。
为了量化幅度调制到相位调制的传递函数,对 133 MHz 正弦波进行幅度调制,调制信号为 1 MHz 至 10 GHz 的正弦波,调制系数为 0.10。
在调幅正弦波之后加入单极低通滤波器,截止频率分别设置为 100 MHz、250 MHz 和 500 MHz。该低通滤波器代表信号的主导时间常数。测量每个调制波形的单位间隔(UI)时间间隔误差(TIE),其均方根值随调制频率的变化关系如图 9 所示,对应各个低通滤波器。
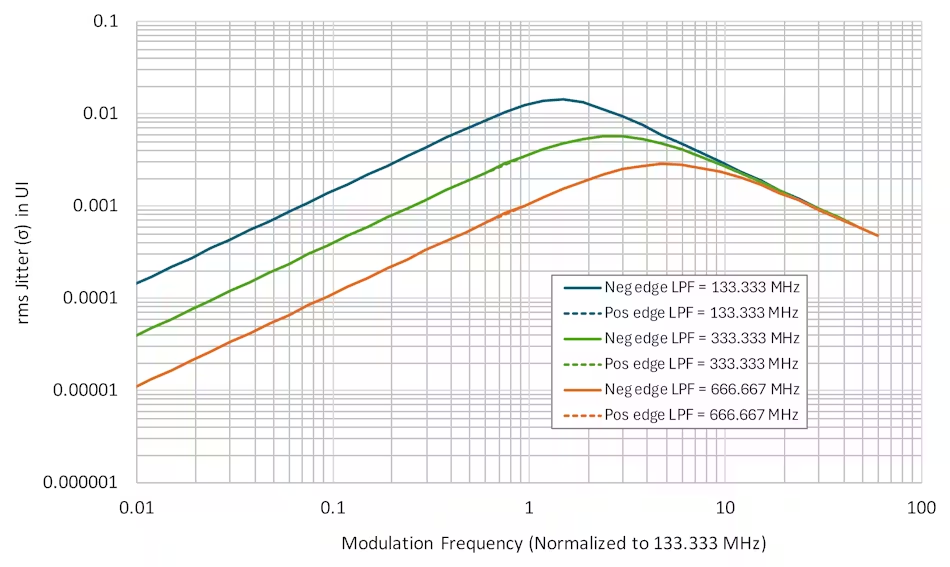
9. 正、负沿均方根抖动随正弦调制频率的变化。
幅度到相位调制的传递函数随调制频率升高而增大,一直持续到超过代表信号主导极点的低通滤波器截止频率。由于幅度调制为单一频率,当调制频率超过信号主导极点频率后,传递函数会随之减小。
如果幅度调制包含多个频率,传递函数的斜率会趋近于零。这是因为更高的调制频率不会增加总相位调制。
将幅度调制从单一正弦波扩展到均匀噪声,对一组被均匀随机噪声调幅的 100 MHz 方波计算均方根相位抖动。噪声带宽在 10 MHz 到 10 GHz 之间变化。RC 低通滤波器在 10 MHz 到 800 MHz 之间变化,以反映信号或系统的主导极点。
均方根抖动结果如图 10 所示,图 11 为其曲线拟合的放大与归一化视图。均方根抖动随调制带宽呈现渐近特性,其转折频率与方波或系统的主导极点相关。仔细观察图 11 可以发现,当噪声带宽超过信号或系统主导极点频率的约 10 倍时,均方根抖动与其渐近值的误差小于 1%。
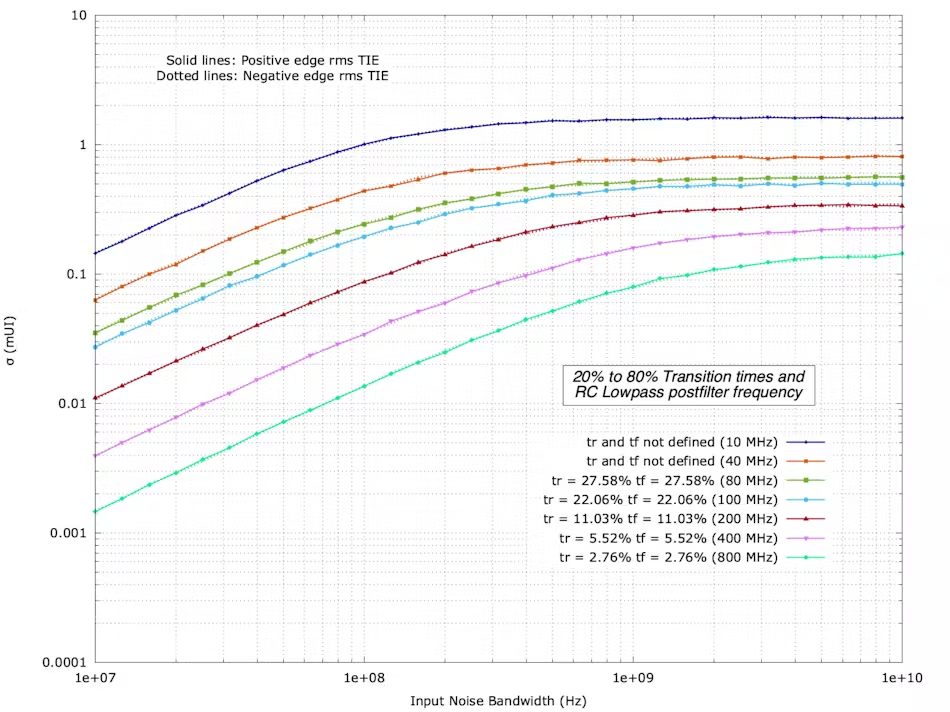
10. 输入噪声带宽与系统 / 信号带宽对均方根抖动的影响。
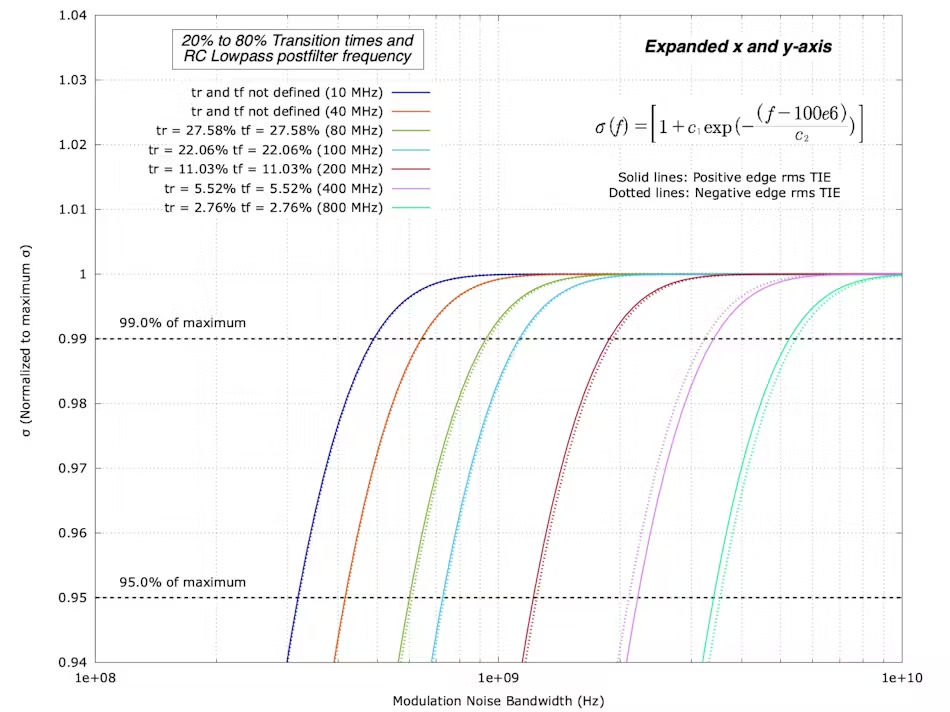
11. 归一化均方根抖动随输入噪声带宽与系统 / 信号主导极点带宽的变化。
参考图 9 中的单一正弦波调制结果,主导极点 10 倍处的频率会对调制噪声产生 20 dB 的衰减。高于该频率的调制频率,输入噪声不再对相位噪声有显著贡献。结论是:为在瞬态噪声仿真中准确估算均方根相位抖动,应将最大噪声带宽设置为被分析信号或系统主导极点频率的 10 倍。
为进一步验证该假设,对 8 个 100 MHz 调幅方波分别计算输入噪声带宽在 10 MHz 到 10 GHz 之间的均方根抖动。尽管占空比、跳变时间、噪声类型和调制系数各不相同,这些波形的主导极点均为 800 MHz。
图 12 给出了每个波形积分相位噪声的归一化曲线拟合随输入噪声带宽的变化。均方根抖动达到渐近值的频率各不相同。但是,当输入噪声带宽为 8 GHz(800 MHz 主导极点的 10 倍)时,所有情况下的均方根抖动与其渐近值误差均在 1% 以内。
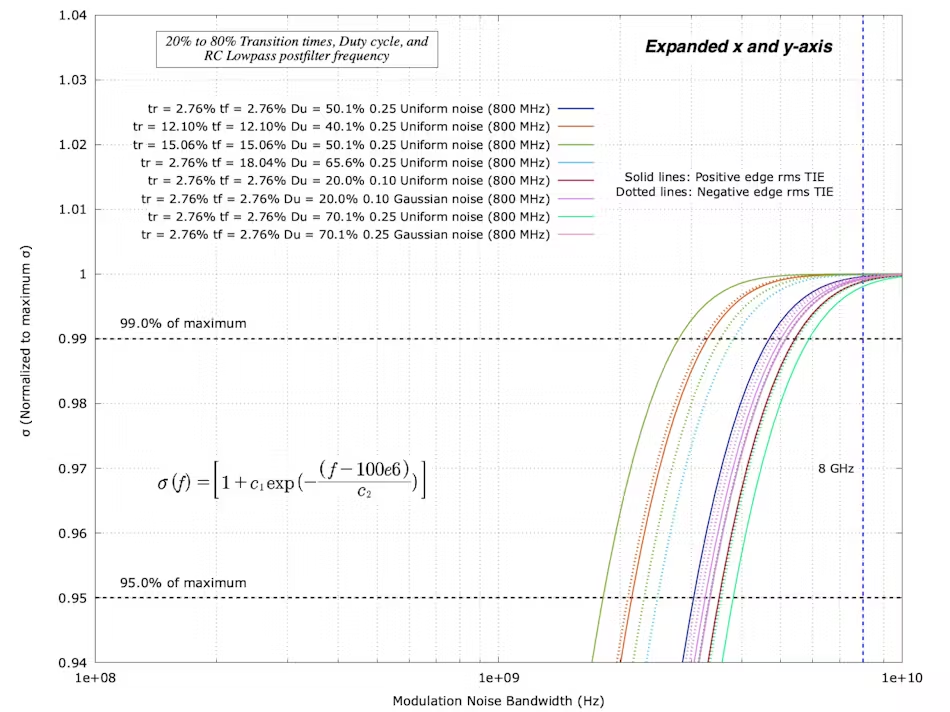
12. 八个 100 MHz 调幅方波示例的归一化均方根抖动随输入噪声带宽的变化。
极点定位:确定信号或系统的主导极点
重申一次:在瞬态噪声仿真中,当最大瞬态噪声带宽设置为信号或系统主导极点的 10 倍时,可以非常准确地估算信号的均方根抖动。但首先要如何确定主导极点频率?
如果波形或系统输出信号的跳变时间受主导极点限制,并且在两个阈值之间测量,则能够产生相同跳变时间的等效低通滤波器转折频率的−3 dB 带宽可由公式 1 求得。
例如,如果测得最大 20%~80% 跳变时间为 1 ns,则公式 2 表明−3 dB 带宽为 220.6 MHz。因此,为在瞬态噪声仿真中估算该信号的相位噪声,并使均方根抖动精度优于 1%,最大噪声带宽应至少设置为 10 × 220.6 MHz,约等于 2.2 GHz。

通过观察信号最小跳变时间的斜率,可以对限制机制的性质有所判断。如果受主导极点限制,跳变沿的斜率本质上是指数型的。如果最小跳变受其他机制限制(例如电流限制),其斜率可能呈线性或恒定。在这种情况下,对信号进行傅里叶分析有助于估算其主导极点频率。
图 13 对比了两个 100 MHz 方波的功率谱密度,二者 20%~80% 跳变时间相同,均为 12.1%。但是,一个波形具有分段线性 20% 跳变时间,后接 800 MHz 低通滤波器;另一个波形具有分段线性 0.10% 跳变时间,后接 182.3 MHz 低通滤波器。前者波形的跳变时间不受主导极点限制,而后者因 182.3 MHz 低通滤波器而受极点限制。
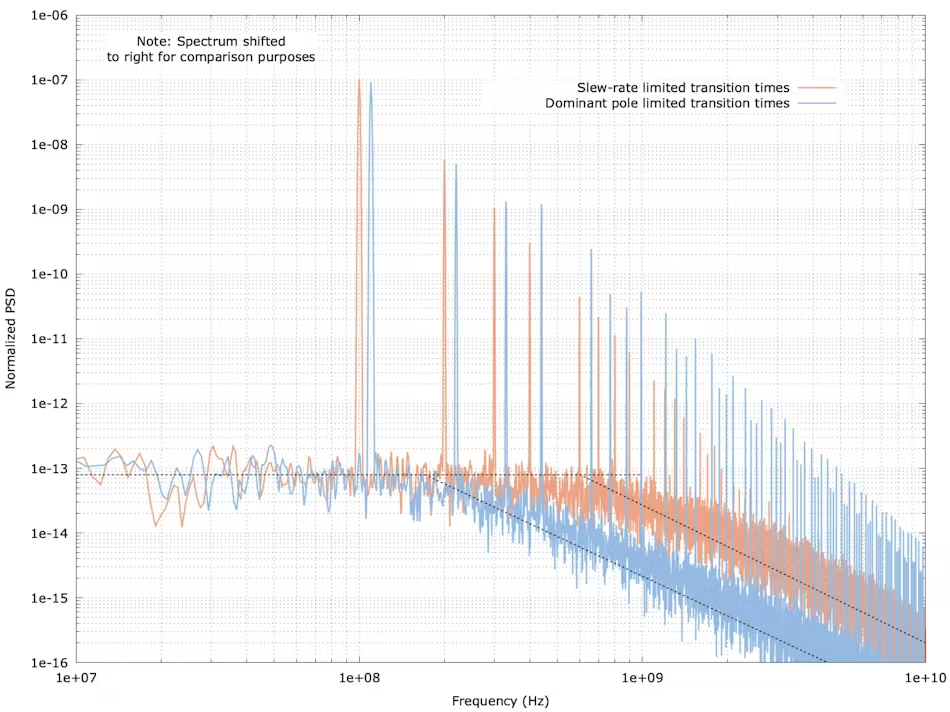
13. 通过观察功率谱密度底噪估算系统 / 信号带宽的两个示例。
观察每个波形的底噪可以估算系统的主导极点。图 13 中的虚线渐近线很好地估算出前、后两个波形的系统主导极点分别约为 800 MHz 和 180 MHz。
瞬态噪声仿真总结与建议
为了给出瞬态噪声仿真的最大瞬态噪声带宽取值,本文对一组 100 MHz 波形进行均匀与高斯随机噪声调幅,噪声带宽在 10 MHz 到 8 GHz 之间变化。实际上,这对应在瞬态噪声仿真中使用 10 MHz 到 8 GHz 的噪声带宽。
对每个波形而言,均方根电压噪声与输入噪声带宽的关系表明:超过某一特定输入噪声带宽后,均方根噪声趋近于渐近值。
从该数据可知,使均方根噪声与其渐近值误差在 1% 以内的最小输入噪声带宽,与方波谐波功率比基波低 20 dB 所对应的频率高度吻合。
由于幅度调制会引入相位调制,本研究还分析了为准确估算由幅度噪声转换为相位噪声所带来的抖动,所需的最小噪声带宽。与均方根电压噪声结果不同,积分相位噪声趋近渐近值所对应的最小输入噪声带宽,与信号或系统主导极点的带宽最为接近。
结论如下:
为在瞬态噪声仿真中准确估算电压噪声,应将最大瞬态噪声带宽设置为:目标信号的谐波功率比基波低 20 dB 及以上所对应的频率。
为在瞬态噪声仿真中准确估算相位噪声,最大瞬态噪声带宽应设置为信号或系统主导极点频率的 10 倍。如需更深入研究,参考文献 3 提供了本研究的扩展版本。
参考文献
1. Guyton, Scott. “Full Spectrum Transient Noise: A must have sign-off analysis for silicon success,” January 29, 2025.
2. Logan, S. M. “Description, Installation, and Use of vpulse: A Program to Create a Sampled Piecewise Linear Periodic Square Wave,” March 18, 2025, v1.10.
3. Logan, S. M. “Selecting the Minimum and Maximum Noise Frequencies in a Transient Noise Simulation to Produce Accurate Noise Measurements,” February 21, 2025, v1.0.



“掌”握科技鲜闻 (微信搜索techsina或扫描左侧二维码关注)











