




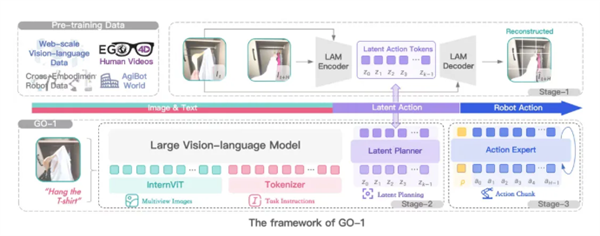
快科技9月23日消息,据媒体报道,智元机器人今日宣布,通用具身基座大模型GO-1(Genie Operator-1)已在GitHub正式开源,成为全球首个采用Vision-Language-Latent-Action(ViLLA)架构的通用具身智能模型。
这一突破性架构通过引入隐式动作标记,有效弥合了图像-文本输入与机器人动作执行之间的语义鸿沟,显著提升了机器人对复杂任务的理解与执行能力。 向全球开发者免费开放,降低具身智能技术门槛。

该模型基于多模态理解、隐式规划和动作生成三层协同设计,支持多视角视觉、力觉信号与语言指令的融合处理。
同时,智元推出Genie Studio一站式开发平台,覆盖数据采集、模型训练到真机部署全流程,助力开发者快速实现具身智能应用落地。GO-1已在多类机器人本体上完成验证,展现出优秀的可移植性与仿真性能。
值得一提的是,智元机器人在不久前正式发起Genie Trailblazer全球招募计划,向全球的具身智能研究团队发出邀请,聚焦通用具身智能模型、具身世界模型、高级遥操作三大核心探索方向。
【本文结束】如需转载请务必注明出处:快科技
责任编辑:鹿角



新浪科技公众号

“掌”握科技鲜闻 (微信搜索techsina或扫描左侧二维码关注)











