




网友都说新浪众测不讲武德,数码新品说发就发,新奇好物说送就送。不怕你没想法,就怕你不行动,加入新浪众测,和数码大V一起聊产品,谈体验!
波士顿动力机器狗 Spot 的能力如何,我们已经领略过了。
我们知道,它可以适应各种崎岖地形:

表演过齐舞:

也能按下把手开门:
除了这些我们熟知的“低阶能力”,今年 Spot 其实也成长了不少,种花、写字、清洁垃圾、跳大绳都不在话下。
3 月初,SpaceX 星舰原型 SN10 降落发生爆炸后,正是 Spot 奔赴第一线,检查星舰爆炸情况、评估发动机的损害程度。前不久,Spot 也开始参与法国军队的日常训练,或许未来战场上将出现 Spot 的身影。
恰巧在昨天,一则关于 Spot 新技能的消息刷屏了:一位名叫 Michael Reeves 的 Youtuber 历时 6 个月,通过安装摄像头、喷嘴万向节等,给 Spot 增加了一个倒啤酒的新技能。
然鹅,由于最终准确率仅仅 35%,因此场面一度尴尬,Michael Reeves 原本设想的倒酒机器狗竟然变成了撒尿机器狗。。。。。。
不得不说,在网友的脑洞加持下,Spot 快被“玩坏了”,而这也说明它关注度高、实力不凡。
但值得注意的是,即便是备受关注的网红机器狗,也要面对不小的竞争压力。
毕竟,这届机器狗太强,可以说是无所不能了。
比如走梅花桩:

接受‘铁狗五项’挑战:

挂上牛头,和idol一起上春晚:

而就在最近,美国加州大学伯克利分校也设计了一只机器狗。
相比被用于军事用途、被网友恶搞,这只狗子的主要功能显得有点儿温情:为视障人士导盲。
刚性驱动臂换成牵引带
目前,这只导盲犬的相关研究成果可以在预印本平台 arXiv 上找到,论文题为 Robotic Guide Dog: Leading a Human with Leash-Guided Hybrid Physical Interaction(机器导盲犬:用牵引带引导的混合物理交互为人类导航)。

众所周知,导盲犬在社会中扮演着至关重要的角色,对特殊群体而言,导盲犬不是工具,而是一位伙伴、是一种保护、是他们与这个世界的连接。
一只表现出色的导盲犬,通常都经过了严格的筛选和训练。但如果用技术的思维来看导盲犬的训练工作,我们就会意识到一个问题——一只狗获取的技能无法转移到另一只狗身上,这使得导盲犬训练既费时又费力,而且过程不容易扩展。
基于此,加州大学伯克利分校研究团队的目标是设计一个能导盲的机器人。
论文介绍,机器人导盲其实并非什么新鲜事,不过目前看来,大多数导盲机器人系统都是基于带有大底座的轮式平台,并带有可驱动刚性导向臂。

研究团队认为:
受大底座和驱动臂的限制,传统的导盲机器人一般都很难在狭窄、混乱的环境中工作。此外,驱动臂也给机械控制设计带来了额外的复杂性。
研究团队因此尝试把传统的刚性驱动臂换作一条牵引带。
实际上牵引带并不是说换就能换,毕竟相比外形相对固定的驱动臂,牵引带时而紧绷时而松弛,其变化将更为复杂。下图展示的是牵引带紧绷和松弛的两种状态。
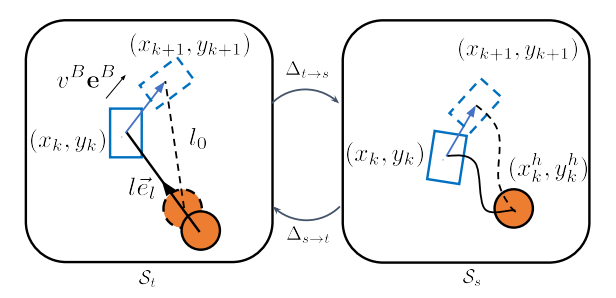
研究团队提出了一种包含牵引带张力的混合人-机物理交互模型,用于描述机器人导盲系统的动力学关系。研究团队将该模型应用于一个混合整数规划问题中,并建立了一个反应规划器,它可以利用松-紧开关,引导视障人士在有限空间内安全前行。
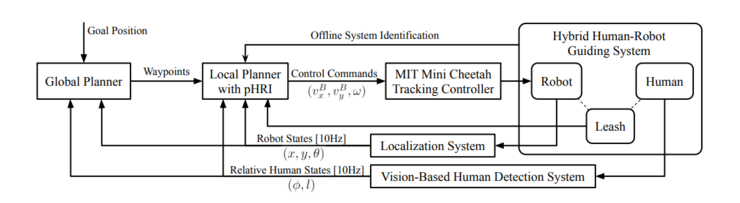
规划器的工作流程具体是:确定当前位置和目标位置后,全局规划器首先使用算法为局部规划器生成目标可行路径点,接着局部规划器生成一条短的轨迹,再向机器人发送控制命令。
研究团队设计的框架大致如下图所示。
由会后空翻的小猎豹“进化”而来
在提出上述机器人框架之后,研究团队将其部署在一个小型四足机器人身上。
值得关注的是,研究团队用到的四足机器人是 Mini Cheetah(翻译过来就是小猎豹)。
ICRA2019 会议期间,来自 MIT 机械工程系、电气工程与计算机科学系的一组研究人员发表论文,官宣了 Mini Cheetah。

简单来讲,Mini Cheetah 是一种高 0.3m 左右、重 9 kg 的四足机器人,它体积小、功能强大、机械坚固,使用了定制的可反向驱动模块化驱动器。当时 Mini Cheetah 已经能进行小跑演示,速度高达每秒 2.45 米;还能做出 360° 后空翻的动作。
研究团队基于Mini Cheetah做了这几点设计:
借助二维激光雷达实现机器人定位;
用深度相机进行人体检测;
配备先进的速度跟踪控制器(雷锋网注:根据给定的速度命令计算出所需地面反应力和位置信息,可以算出关节位置速度,这一信息将传递给关节控制器,产生关节力矩)。
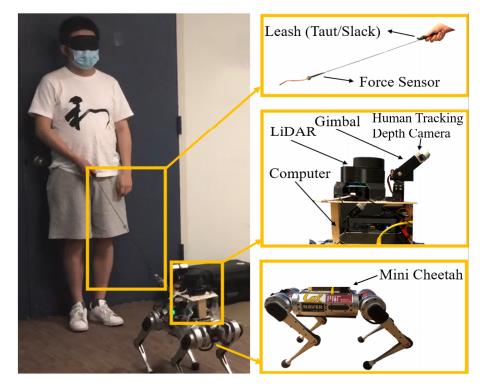
最终,Mini Cheetah成为了一只名副其实的机器导盲犬。
我们来看看效果(下图中最窄处宽度是 0.8 米)。
无疑,这款能够带人类穿过狭窄杂乱空间的自主机器人,对视障人士来说将是一大福音。
未来机器人还将在导盲能力上如何改进,雷锋网将继续保持关注。



“掌”握科技鲜闻 (微信搜索techsina或扫描左侧二维码关注)











