

新出生的机器狗,打滚1小时后自己掌握走路,吴恩达开山大弟子最新成果
欢迎关注“新浪科技”的微信订阅号:techsina
文/明敏
来源:量子位(ID:QbitAI)
现在,让机械狗自己打滚一个小时,它就能学会走路了!
步态看着相当有模有样:
还能扛住大棍子的一通狂怼:
就算是摔了个四仰八叉,翻个身自己又站起来了:
如此看来,训机械狗和普通训狗真是要没什么两样了啊。

这就是UC伯克利大学带来的最新成果,让机器人直接在实际环境中训练学习,不再依赖于模拟器。
应用这一方法,研究人员在短时间内训练出了4个机器人。
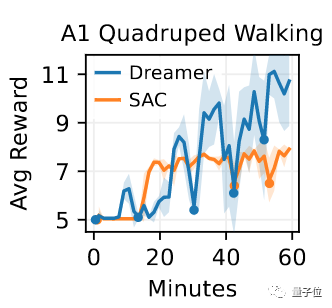
比如开头看到的1小时学会走路的机械狗;
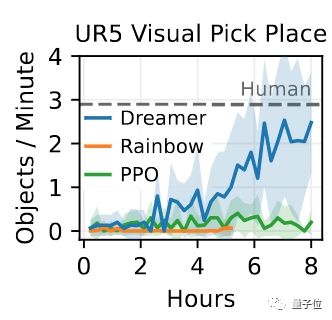
还有2个机械臂,在8-10小时实战抓取后,表现接近于人类水平;
以及一个拥有计算机视觉的小机器人,在自己摸索2小时后,能丝滑地滚动到指定位置。
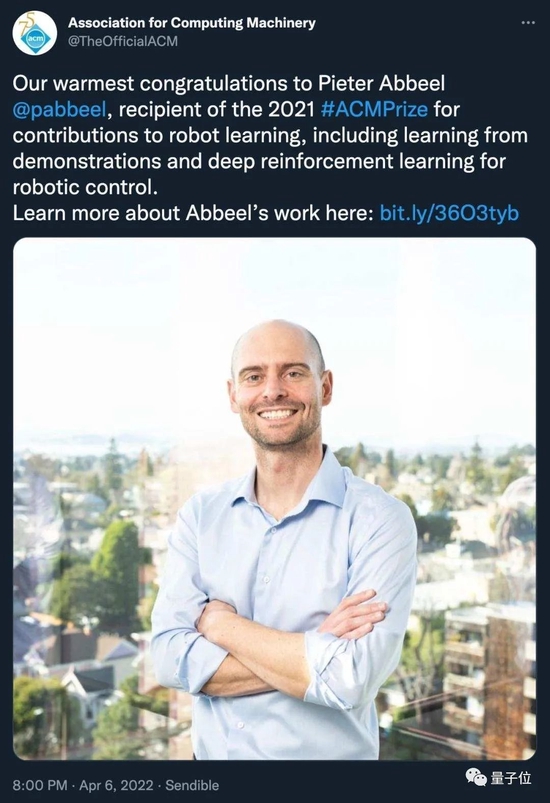
该研究由Pieter Abbeel等人提出,Pieter Abbeel是吴恩达的第一位博士生,前不久他刚刚获得2021 ACM 计算奖(ACM Prize in Computing)。
目前,该方法的所有软件基础架构已经开源。
一个叫做“空想家”的算法
本文方法的pipeline大致可分为4步:
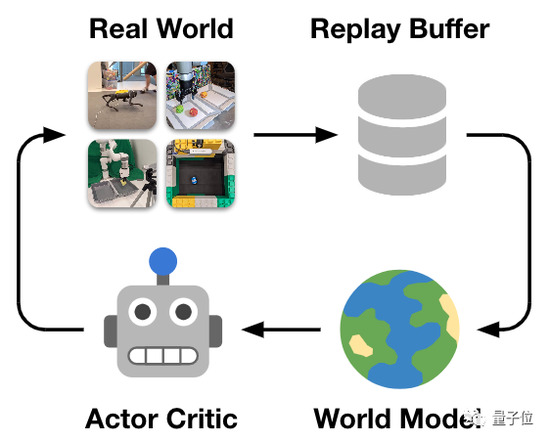
第一步,是先把机器人放在真实环境里,收集数据。
第二步,把这些数据传输到Replay Buffer。这一步骤就是利用历史数据进行训练、“总结经验”,高效利用收集到的样本。
第三步,World Model会对已有经验进行学习,然后“脑补”出策略。
第四步,再用演员评论家(Actor Critic)算法来提升策略梯度法的性能。
然后循环往复,将已经提炼出的办法再使用到机器人身上,最后达到一种“自己摸索学习”的感觉。
具体来看,这里的核心环节是World Model。
World Models是2018年由DAVID HA等人提出的一种快速无监督学习方式,获得了NIPS 2018的Oral Presentation。
它的核心理念是认为人类是基于已有经验,形成了一个心理世界模型,我们所做的决定和行动都是基于这个内部模型。
比如人类在打棒球时,做出反应的速度远比视觉信息传达到大脑中的快,那么在这种情况下还能正确回球的原因,就是因为大脑已经做出了本能的预测。
此前,基于World Model这种“脑补”的学习方法,谷歌提出了Dreamer这种可扩展的强化学习方法。
这一次提出的方法是在此基础上,叫做DayDreamer。
(貌似可以叫做空想家?
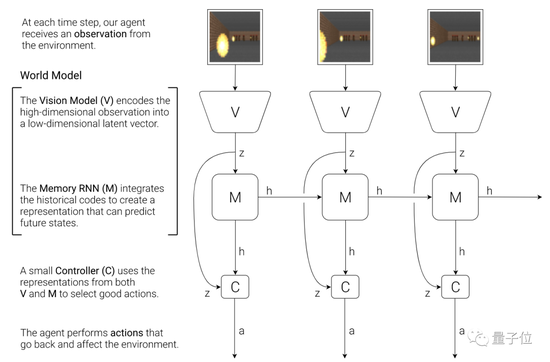
具体来看,World Model就是一个智能体模型。
它包括一个视觉感知组件,能将看到的图像压缩成一个低维的表征向量作为模型输入。
同时还有一个记忆组件,可以基于历史信息,对未来的表征向量做出预测。
最后,还包括一个决策组件,它能基于视觉感知组件、决策组件的表征向量,决定采取怎样的动作。
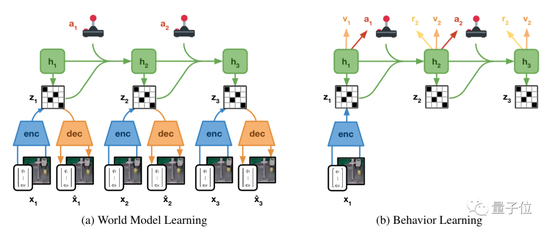
现在,我们回到本次UC伯克利学者提出的方法。
不难发现,其中World Model Learning部分的逻辑就是一个经验积累的过程,Behavior Learning部分则是一个动作输出的过程。
本篇论文方法的提出,主要解决了机器人训练中两方面的问题:
效率和准确率。
一般来说,训练机器人的常规方法是强化学习,通过反复实验来调整机器人的运作。
不过这种方法往往需要非常大量的测试,才能达到很好的效果。
不仅效率低下,而且训练需要付出的成本也不低。
后来,不少人提出在模拟器中对机器人进行训练,可以很好增效降本。
但是本文作者认为,模拟器训练方法在准确性方面的表现还是不够好,只有真实的环境才能让机器人达到最好的效果。
从结果来看,在训练机器狗的过程中,只花10分钟时间,机器狗就能适应自己的行为了。
和SAC方法对比来看,效果有明显提升。
在机械臂训练过程中,这一新方法还克服了视觉定位和稀疏奖励的挑战,几小时内的训练成果明显优于其他方法。
研究团队
值得一提的是,本次带来新成果的研究团队成员,也非常令人瞩目。
其中,Pieter Abbeel是吴恩达的开山大弟子。

他现在是UC伯克利电气工程和计算机科学教授,伯克利机器人学习实验室主任,伯克利AI研究院共同主任,曾加入过OpenAI。
前不久,他还获得了2021 ACM 计算奖(ACM Prize in Computing),以表彰其在机器人学习方面的贡献。
与此同时,他还是AI机器人公司Covariant的联合创始人。
另一位Ken Goldberg,也是AI领域的顶级专家。
他现在是UC伯克利工程教授,研究方向为强化学习、人机交互等。
2005年,他被评选为IEEE院士。
与此同时,Goldberg还是一位艺术家,是UC伯克利艺术、科技文化研讨会的奠基人。
此外,Philipp Wu、Alejandro Escontrela、Danijar Hafner三人为共同一作。
其中Philipp Wu还只是UC伯克利一位大四的学生。
One More Thing
在观看机械狗训练的视频时,我们发现研究人员使用的Unitree机械狗,
这个品牌来自中国企业宇树科技,之前登上过春晚的机器小牛,也来自它家。

而且,最近宇树机器狗集体进行Go1测试的视频曝光,还在国外火了一波。

论文地址:
https://danijar.com/project/daydreamer/
参考链接:https://worldmodels.github.io/

(声明:本文仅代表作者观点,不代表新浪网立场。)

作者简介



