


牛市来了?安装新浪财经客户端第一时间接收最全面的市场资讯→【下载地址】

4月4日,埃塞民航局召开记者会,在会上埃塞民航局并没有公布完整事故初步报告,只是公布了他们认为的问题。
不过,目前详细的初步报告已出,报告包含了CVR(语音记录器)和FDR(飞行数据记录器)的部分数据。限于篇幅所限,我们略去已知的内容,重点看看之前大家所不知道的内容和误解。
解读
我们重点看看事故是怎么诱发的,以及整个失事过程是怎么回事:
这两张图是来自飞机的FDR的数据,数据显示,飞机最后是以500kt也就是926公里每小时,下俯40度以上高速坠地,这些与之前分析一致。

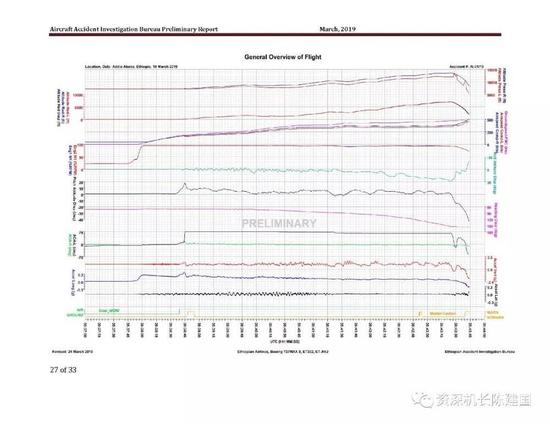
1. 图中标1的地方是事故的触发点,在这一点,是05:38:44(时:分:秒):
飞机刚刚离地,左侧的迎角读数突然异常,读数突然降低到11.1°,然后增加到35.7°,右边读数是14.94°。紧接着0.75秒之后,左侧的读数达到74.5°,而右边的读数增加到15.3°,同时触发了左侧驾驶杆抖杆信号,直到飞机坠毁抖杆信号都没有消失。
同时左座速度、高度、指引都和右座有差(左侧偏低),这个偏差一直到飞机坠毁。(高度:刚刚离地,速度:正常)
2. 图中标2的地方是“副驾驶两次喊出“安定面配平切断””的位置,机长同意,然后“副驾驶证实安定面配平切断”(?)。
之后5秒钟,有一个安定面配平向下的指令,但是安定面并没有移动。(此时高度大约离地面1000多英尺,速度已经在340kts,也就是Vmo)
编者注:VMO系飞机最大操作限制速度,在任何飞行阶段,都不允许故意超过此速度。
3. 图中标3的地方是飞行数据记录终止前32秒钟,有两次机头向上的电动配平,安定面也从2.1个单位移动到了2.3个单位,证明电动配平确实有移动。
但是在之后的5秒钟,安定面配平向下打了5秒钟,安定面也从2.3度向下到1.0度(这个应该是MCAS工作)。
飞机直到坠毁,安定面都保持在1.1到0.8度左右。(此时高度离地7000英尺,气压高度14000英尺,速度超过340kts)
4. 图中标4的地方是副驾驶报告不能使用手动配平进行安定面配平的位置(此时高度大约离地3000英尺,气压高度10000~11000英尺,速度大于340kts)
编者注:涉事地点为高原,因此气压高度远大于离地高度
CVR录音(驾驶舱语音记录)
以下是来自初步调查报告的飞机CVR的录音(感谢飞行圈小冰翻译):
· 05:37:34:ATC给ET-302发布起飞许可,并且联系雷达119.7
· 05:38:起飞跑道07R,标高为2333.5米。开始滑跑时间大约是05:38:,襟翼设置5度,安定面配平5.6个单位。起飞滑跑基本正常,左右迎角探测器探测值也正常。滑跑过程中,发动机在94%N1稳定下来,与数字式飞行数据记录仪记录的N1基准值一致。从此刻开始,在飞行的绝大多数时间内,发动机N1保持在大约94%,并且推力手柄没有移动过。在记录终止前220秒,N1目标值显示为无数据模式。
根据驾驶舱语音记录仪以及飞行数据记录仪的记录,机长为操纵飞行员。
编者注:N1指发动机低压转速。
· 05:38:44:离地后不久,左右迎角探测器探测的数值出现不一致。右迎角探测器显示14.94度,左迎角探测器的数值先降低到11.1度,然后又上升到35.7度。之后左迎角探测器的数值在3/4秒内达到了74.5度,而右侧迎角探测器最大数值为15.3度。
此时左侧抖杆器开始抖杆,并且一直持续到接近记录结束。同时,左侧的空速,高度和飞行指引杆的俯仰值和右侧相应显示相比出现显著不一致。
左侧的数值低于右侧数值,直到记录接近结束。
编者注:抖杆为失速警告,但这里应该是由迎角传感器故障导致
· 05:38:43:大概50英尺无线电高度,飞行指引的横侧方式保持LNAV(水平导航)
· 05:38:46:大概200英尺无线电高度,主警告参数状态发生变化。语音记录仪记录下副驾驶喊话 主警告防冰。4秒以后,记录的左迎角探测器加热参数状态发生变化。
· 05:38:58:大概400英尺无线电高度,飞行指引的俯仰方式变成VNAV SPEED方式,机长喊话“COMMAND”(接通自动驾驶仪的标准喊话),同时记录下了自动驾驶仪的警告。
编者注:VNAV为垂直导航,有速度保护功能
· 05:39:00:机长喊话“COMMAND”
· 05:39:01:大约630英尺无线电高度,记录到第二次自动驾驶警告。
· 05:39:06:机长告诉副驾驶联系雷达,副驾驶报告了SHALA2A离场,通过8400英尺正在上升高度层320。
编者注:应为SHALA1A离场
从离地到距离地面1000英尺高度之间,人工电动配平输入使俯仰配平从4.9到5.9个单位之间移动。在距离地面1000英尺高度的时候,俯仰配平是5.6单位。
· 05:39:22:大约1000英尺的时候,左侧自动驾驶仪被接通(大概33秒之后断开),襟翼被收上,配平减少到4.6单位
· 自动驾驶仪接通6秒后,出现小振幅的滚转震荡,同时伴随横侧加速,方向舵波动和轻微的航向改变。这些震荡和波动在自动驾驶仪断开后仍然持续。
· 05:39:29:雷达管制员识别了ET-302,并且指令爬升到高度层320,可以右转直飞RUDOL,副驾驶确认收到指令。
· 05:39:42:高度层改变方式接通。选择的高度是32000英尺。方式改变后不久,选择速度被设置为238节。
· 05:39:45:机长下令襟翼收上,副驾驶确认。一秒钟以后,襟翼手柄从5度移动到0度,襟翼开始收上。
· 05:39:50:选择的航向从072度变成197度,同时机长让副驾驶请求保持跑道航向。
· 05:39:55:自动驾驶脱开。
· 05:39:57:机长再次让副驾驶请求保持跑道航向,并且告诉管制员他们的飞行操纵有问题。
· 05:40:00:自动驾驶仪断开后不久,飞行数据记录仪记录到机头向下被激活了9秒钟,俯仰配平从4.6变成2.1单位。飞机爬升中止,并且出现一点点下降。
· 05:40:03:近地警告系统(GPWS)发出“DON‘T SINK”(不要下降)警告。
· 05:40:05:副驾驶报告ATC他们不能保持SHALA1A离场,申请保持跑道航向,ATC予以批准。
· 05:40:06:左右襟翼位置到达0.019的记录值,并且一直保持到记录结束。
在自动机头向下的运动中,操纵杆向后移动,飞机重新建立爬升。
· 05:40:12:大概水平安定面机头向下的移动结束后3秒钟,飞行数据记录仪记录到来自飞行员控制的操纵杆上的机头向上的电动配平指令,水平安定面按照该指令移动到2.4单位。飞机的俯仰姿态随着操纵杆向后的杆力增加,基本保持不变。
· 05:40:20:大约水平安定面机头向上移动结束后5秒钟,出现第二次自动机头向下的配平,这次水平安定面向下到达0.4单位
· 05:40:23:到05:40:31 发生了三次“不要下降”的近地警告
· 05:40:27:机长让副驾驶和他一起向上配平。
· 05:40:28:记录到向上的人工电动配平,水平安定面按照机头向上的方向移动,到达2.3单位。
· 05:40:35:副驾驶两次喊话“安定面配平切断”。机长同意,副驾驶确认了安定面配平切断
· 05:40:41:大概安定面机头向上配平移动结束后5秒钟,发生了第三次自动机头向下的配平指令,但是安定面并没有相应地移动,这也证实了安定面配平切断开关是在“切断”的位置。
· 05:40:44:机长三次喊话“拉起来”,副驾驶确认。
· 05:40:50:机长告诉副驾驶,通知ATC他们需要保持14000英尺,并且飞行操纵有问题。
· 05:40:56:副驾驶向ATC申请保持14000英尺,并且报告了他们有飞行操纵的问题。ATC批准所请。
· 05:40:42:到 05:43:11 (大概两分半钟之内),安定面位置逐渐向机头向下方向从2.3移动到2.1单位。在此期间,操纵杆上的向后的杆力使得操纵杆保持在中立位的后面。左侧指示空速从大概305节增加到大概340节。右侧指示空速比左侧的大概大20-25节。数据表明,在记录的余下部分,出现过几次左右操纵杆同时向后带杆的杆力。
· 05:41:20:语音记录仪记录到右侧的超速的嗒嗒声,一直持续到记录结束。
· 05:41:21:选择高度从32000变成14000英尺。
· 05:41:30:机长让副驾驶和他一起将机头带起来,副驾驶确认。
· 05:41:32:左侧的超速警告被激活,并且间断持续到记录结束。
· 05:41:46:机长问副驾驶配平是否工作正常。副驾驶回答配平不工作,并且问机长自己(副驾驶)是否可以尝试人工配平。机长告诉他试一下。在05:41:54,副驾驶回答(人工配平)不工作。
· 05:42:10:机长让副驾驶请求雷达引导返航,ATC予以批准。
· 05:42:30:ATC指令ET-320右转航向260度,副驾驶确认。
· 05:42:43:选择航向设置到262度。
· 05:42:51:副驾驶提到主警告:防冰。该主警告被数字式飞行数据记录仪记录下来。
· 05:42:54:两名飞行员同时喊话“左侧迎角探测片”。
· 05:43:04:机长让副驾驶一起带起机头,并且说仰角还不够。
· 05:43:11:大概记录结束前32秒钟,大概高度13400英尺的时候,记录到2次人工的机头向上的电动配平。安定面按照机头向上的方向,从2.1移动到2.3单位。
· 05:43:20:最后一次人工电动配平输入5秒钟后,又出现自动机头向下的配平指令,安定面位置在大概5秒钟内按照机头向下的方向从2.3移动到1.0单位。飞机开始低头。(机组)同时向后施加带杆的杆力,但是机头继续向下,最终到达40度下俯角。
安定面的位置在余下的记录时间里,在1.1到0.8单位之间变化。左侧指示空速增加,最终达到大概458节,右侧指示空速在记录结束的时候达到500节。最后记录的气压高度分别是左侧5419英尺,右侧8399英尺。
埃塞民航当局的看法
对于此次事故,埃塞民航局根据调查过程中收集的初步信息,确定了以下事实:
1. 飞机拥有有效的适航证;
2. 机组持有合格的执行航班的执照和资格;
3. 起飞滑跑正常,包括左右迎角(AOA)是正常值。
4. 离地后不久,左侧迎角传感器的值和右侧不一致,最大达到74.5度,而右侧迎角传感器值为15.3度;之后左侧驾驶杆抖杆器一直在抖杆,并持续到飞行终结。
5. 自动驾驶接通后,出现小振幅横滚震荡(飘摆),伴有横向加速度,方向舵震荡(飘摆)和轻微航向变化,在自动驾驶脱开后,这些震荡(飘摆)仍然继续。
6. 自动驾驶脱开后,DFDR(数字飞行数据记录器)在没有飞行员指令的情况下记录了四次自动飞机机头向下(AND)配平指令。结果,记录了安定面配平三次移动。 FDR数据还表明,机组人员使用了电动配平来抵消自动的机头向下的的配平指令。
7. 机组人员执行了“安定面配平失控”检查单,并将“安定面配平切断”电门关断,并确认使用手动配平操作无效。
空难后采取的安全措施
1. 事故当天,航空公司决定暂停B737-8“MAX”的运营。
2. 2019年3月14日,埃塞俄比亚民航局发布了关于“波音B737-8‘MAX’和波音B737-9‘MAX’飞机从埃塞俄比亚领空内外飞行的航行通告,该通告在此报告出台时仍然有效。
埃塞航空难调查组给出的安全建议
1. 由于在初步调查中注意到重复的非指令飞机机头向下的情况,建议制造商应审查飞机飞行操纵系统的操纵能力。
2. 民航当局应核实在飞机投入运行之前,制造商已充分解决了飞机飞行操纵系统的操纵能力的审查。
对之前事故分析的修正
之前的事故报告是来自只有两分钟的ADS-B数据解码,所以对飞机最后发生了什么并不清楚,现在根据现有的初步事故报告对之前的问题进行修正。
1. 飞机确实发生迎角信号问题;
2. 飞机襟翼是飞行员收上的;但是05:40:00数据显示MCAS在襟翼完全收上之前就已经启动。
3. 飞机爬升到最高气压高度14000多英尺,也就是离地7000多英尺;
4. CVR显示:副驾驶喊话切断“安定面配平”切断电门,副驾驶证实已经切断(?);
5. 副驾驶使用手动配平安定面,并没有转动配平轮;
6. 自动驾驶曾被短时接通,后被断开;
7. 之前描述的飞行员按照波音OMB执行检查单,断开安定面配平电门之后,又接通安定面配平电门是为了再次使用电动配平,在CVR中没有反映出来;
事故的疑问
1. 飞机一直处于满油门飞行,所以飞机一直在加速,直到飞机超过最大速度340kts,最大大约400kts的表速飞行。
尽管飞行员在40:45秒之后大约2:15的时间已经对飞机基本恢复控制,但是飞机油门并没有减小,飞机持续超过最大速度飞行。
没有自动油门的信息,没有显示飞机自动油门出于什么状态,接通或者关断。
2. FDR数据缺少一个最关键的证据:就是“安定面配平切断电门”的位置。
CVR的录音里只显示副驾驶两次喊出关断“安定面配平切断电门”,机长同意,副驾驶证实已经切断,到底是不是已经关断了电门,这个没有FDR数据显示。
3. 在图中2 所标识的有一个所谓的机头向下的指令,但是安定面实际并没有移动,不知道记录的是哪个指令?
笔者认为是FCC的指令。如果没有移动,说明从FCC到安定面有可能是只有信号,而没有做功的电力,这个电力被安定面配平切断电门关闭了。
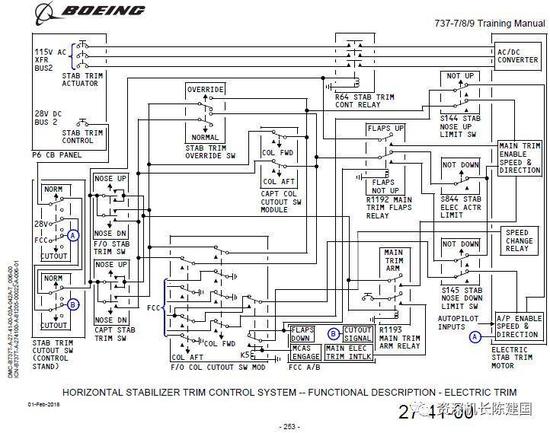
参考下图中间顶端R64继电器。按照波音的设计图,安定面配平切断电门可以断开去安定面的做功的强电电源。
也就是说,只要这个电源断开,安定面配平是不能靠控制信号(弱电信号)移动的,控制信号给马达的转动速率和方向,指令转动螺旋千斤顶的马达转动,而马达转动需要强电电流和电压做功,除非波音提供的设计图错了。
4. 驾驶舱语音通话中没有将“安定面配平切断电门”接通的任何对话。那么安定面配平切断电门是什么时候又被接通的?又是谁接通了这个安定面配平电门?
缺少FDR中关于安定面配平切断电门位置,无法确定该电门什么时候被关断,什么时候又被接通,这个不能不说是一个很大的遗憾!
5. 埃塞当局在招待会上说,这个安定面配平电门后来又被接通了,(没说什么时候,被谁接通)正是因为安定面配平电门的接通,才会有后来飞行员两次短暂使用了电动配平来配平飞机。
但是不幸的是,这引发了MCAS对飞机5秒钟的低头配平(应该是5秒已经到了极限位置,所以不是9.26秒)。
而这个低头的安定面配平在飞机超过340kts的情况下,立即会对飞机产生急剧的低头力矩,飞机瞬间进入不可控的低头俯冲,最终导致飞机失控40度俯角以接近1000公里每小时的速度从离地7000多英尺直插地面坠毁。
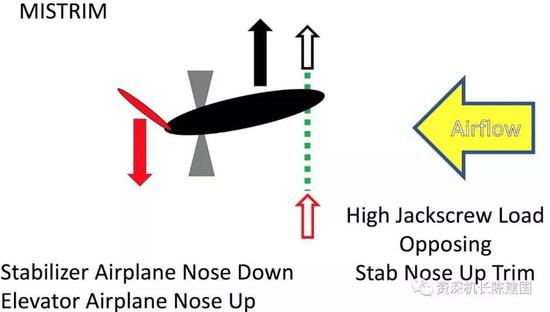
6. CVR中副驾驶称无法使用手动配平,原因应该是在超速飞行时,向后的带杆力和向前的安定面配平会对安定面螺旋千斤顶有很大的应力。
 7. 飞机发生了横滚方面的震荡(飘摆?),没有解释原因。
7. 飞机发生了横滚方面的震荡(飘摆?),没有解释原因。8. 对于MCAS的疑问:MCAS在配平飞机低头时,是否不能通过驾驶盘上的电动配平进行制止?如果飞行员不能通过电动配平制止,飞行员是否只能等飞机加剧低头而无能为力?等过了这个9.26秒之后才能用电动配平让飞机抬头?
9. 埃塞当局对波音提出了质疑,认为波音应该检讨一下飞机俯仰的操纵能力。
波音的股票在埃塞航空初步调查报告之后大涨近3%,是不是外界对MAX的两起空难都是集中在了MCAS系统,而并非其他的故障,所以对MAX未来重新返回蓝天又有了信心?
10. 波音CEO就埃塞当局的初步报告也发表了说明:
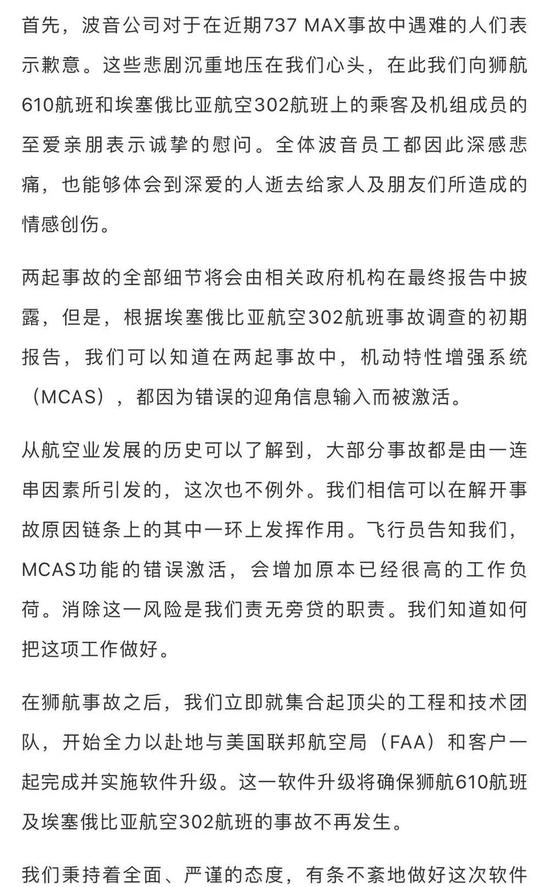
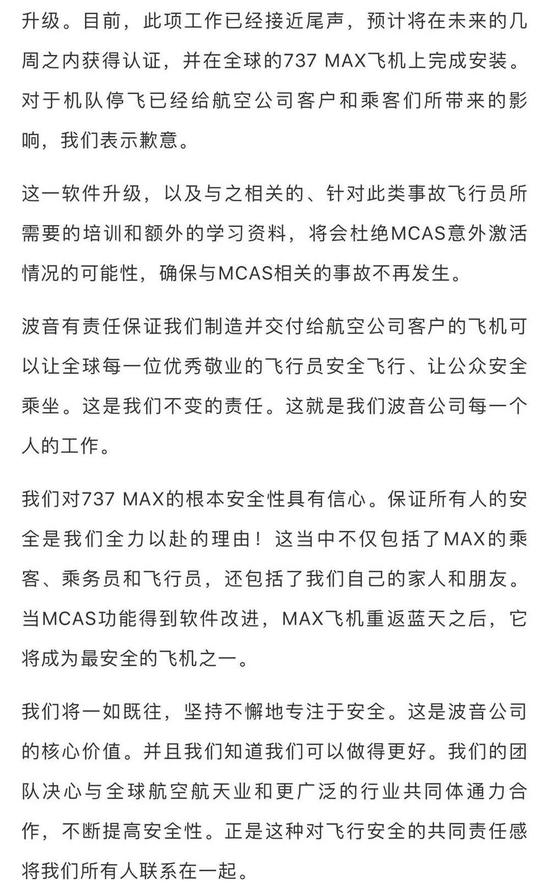

本文来自:资深机长陈建国
免责声明:自媒体综合提供的内容均源自自媒体,版权归原作者所有,转载请联系原作者并获许可。文章观点仅代表作者本人,不代表新浪立场。若内容涉及投资建议,仅供参考勿作为投资依据。投资有风险,入市需谨慎。
责任编辑:张国帅

热门推荐
收起
24小时滚动播报最新的财经资讯和视频,更多粉丝福利扫描二维码关注(sinafinance)




